西门子SIMOTION D4x5-2连接CX32-2扩展驱动控制单元
时间:2016-01-04 20:02 来源:未知 作者:admin 点击:次
1 概述SIMOTION D4x5-2中内置了一个CU320-2驱动控制单元,最多可以控制6个伺服轴或者6个矢量或者12个V/F轴,但如果需要控制更多的电机轴就需要扩展驱动控制单元,除了使用SINAMICS S120的控制单元(比如CU310-2、CU320-2等)以外,还可以通过DRIVE-CLiQ连接CX32-2来扩展驱动控制单元。与其他DRIVE-CLiQ组件不同,当使用CX32-2时需遵循一些特殊规则,本文作了详细描述。1.1 CX32-2硬件介绍CX32-2是专用于SIMOTION D4x5-2的驱动控制器扩展,它与SIMOTION D4x5-2之间通过DRIVE-CLiQ方式连接。与CU320-2相比,CX32-2体积更小,其宽度只有 25mm,是CU320-2的一半;此外,CX32-2不需要CF卡,其固件和数据均保存在SIMOTION D的CF卡中,所以当替换CX32-2时只需更换硬件即可。CX32-2通过内部集成的PROFIBUS总线与SIMOTION进行通讯,通过DRIVE-CLiQ 进行路由,其调试方法与CU320-2相同。 一个SIMOTION D4x5-2控制器可扩展的CX32-2数量限制如表1所示。 表1.SIMOTION D4x5-2连接CX32-2的数量 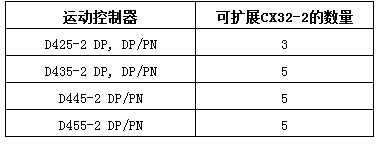 1.2 CX32-2的连接拓扑规则CX32-2的Drive-CliQ连接拓扑结构与其他组件的不太一样,要遵循以下规则:(1)在CX32-2和SIMOTION D4x5-2之间只允许星形拓扑连接。每一个CX32-2都需要对应到一个SIMOTION D上的DRIVE-CLIQ接口,如图1所示。 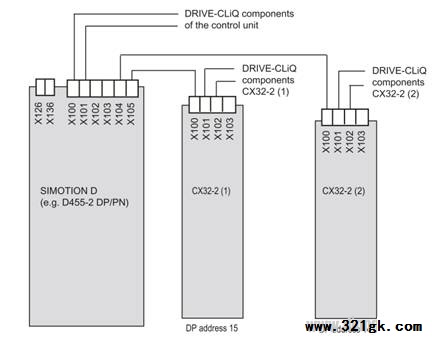 图1.CX32-2的拓扑连接 (2) 在硬件组态画面中插入CX32-2,每一个CX32-2都需要唯一的DP地址相对应,该DP地址与对应连接的DRIVE-CLiQ接口相关,其对应关系如表2所示。 表2.CX32-2的PROFIBUS DP地址 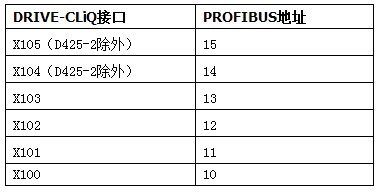 1.3 注意事项对于配置好后的CX32-2,有以下规定需要注意:(1) 已经插入并配置好的CX32-2,如需改接到其它的Drive-CliQ接口,必须修改配置后重新下载硬件组态。 (2) 已经接好的两个DRIVE-CLIQ接口,不可以互相对换。 (3) 之前在硬件组态中配置完成的CX32-2,连接端口不允许再改变。 (4) 如果想改变CX32-2的连接端口,必须在硬件组态中删掉原来的CX32-2,并且重新组态并分配新的地址。 (5) 如果想要删掉CX32-2,必须在硬件组态中进行删除,并重新编译下载。 (6) D4x5-2 不允许连接CX32。 2 CX32-2的配置步骤2.1 配置以SIMOTION D435-2 DP/PN与CX32-2连接为例介绍配置步骤,使用的软件为SIMOTION SCOUT V4.3 SP1HF9。本例中CX32-2连接到SIMOTION的第一个DRIVE-CLiQ接口X100上。步骤如下:(1) 在SCOUT软件中创建一个新项目,并插入SIMOTION D435-2 DP/PN V4.3控制器。 (2) 打开硬件组态画面,在右侧硬件目录中找到“PROFIBUS DP”à“SINAMICS”à“SIMOTION CX32-2”,并将其拖拽至PROFIBUS Integrated总线上,系统会自动弹出其属性窗口,根据CX32-2连接的DRIVE-CLiQ接口设定相应的DP地址,本例中CX32-2连接到SIMOTION的X100接口上,其DP地址应该设置为10,如图2所示。 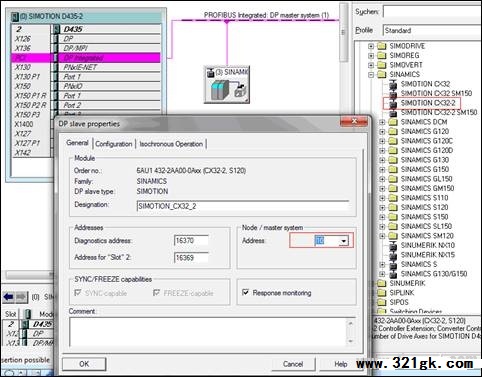 图2.添加CX32-2 (3) 配置完成后,硬件组态画面如图3所示,编译并下载硬件组态。 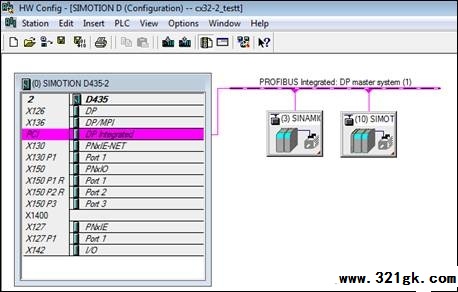 图3. 组态完成 (4) 回到SIMOTION SCOUT软件界面,可以在线连接设备,并可以在SINAMICS_Integrate中的Topology中查看CX32-2的拓扑连接,如图4所示。首先在线对SINAMICS_Integrated进行自动配置完成后再对CX32-2进行配置,其配置方法与SIMOTION内部集成的SINAMICS相同,详情请参考S120调试手册。 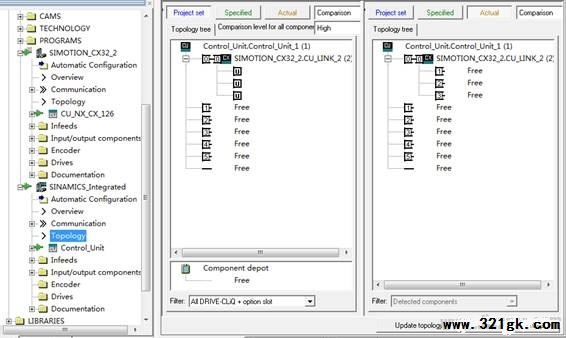 图4. 在线连接CX32-2 2.2 在CX32-2上的参数互连由于不同的CX32-2之间,CX32-2和SINAMICS Integrated之间不可以直接通讯,所以分别挂在两者之上的Infeed和MotorModule之间就无法进行参数的互连,下面分别举例说明:(1) 如图5中所示拓扑结构,Infeed连接在D4x5-2的DRIVE-CLIQ接口上,这样Infeed的信号“Closed-loop control operation”r863.0,就无法直接连接到由CX32-2控制的MotorModule P864中。但是,对于连接在D4x5-2的DRIVE-CLIQ接口上的下列信号,为CX32-2提供了特殊的通道来获取: a) “Closed-loop control operation”r863.0的状态,可以在CX32-2的参数r8510.0获得,可以直接将r8510.0连接到CX32-2控制的MotorModule P864中,如图6所示。 b) D4x5-2上集成数字量输入(X122/X132,DI 0...7 and DI/DO 8...15)的状态,可以在CX32-2的参数r8511[0…15]中查看。 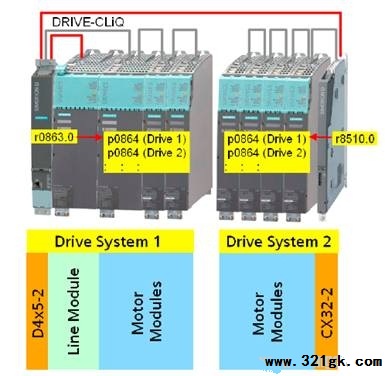 图5.驱动系统的拓扑结构 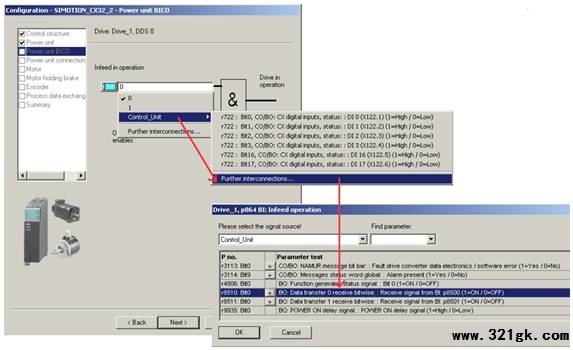 图6. r8510.0的参数连接 (2)如果Infeed连接在了另外的CU320-2的DRIVE-CLIQ接口上(非SINAMICS_Integrate d),建议通过CU上的数字量输入输出来连接“Infeed operation”信号,考虑到信号的延迟,不建议通过PROFIBUS/PROFINET传输此信号。 (责任编辑:admin) |