变频器接线标准规范-张力控制系统中的张力控制与变频
时间:2016-05-28 10:31 来源:未知 作者:admin 点击:次
| 信号线与动力线必须分开走线:使用模拟量信号进行远程控制变频器时,为了减少模拟量受来自变频器和其它设备的干扰,请将控制变频器的信号线与强电回路(主回路及顺控回路)分开走线。距离应在30cm以上。即使在控制柜内,同样要保持这样的接线规范。该信号与变频器之间的控制回路线最长不得超过50m。 信号线与动力线必须分别放置在不同的金属管道或者金属软管内部:连接plc和变频器的信号线如果不放置在金属管道内,极易受到变频器和外部设备的干扰;同时由于变频器无内置的电抗器,所以变频器的输入和输出级动力线对外部会产生极强的干扰,因此放置信号线的金属管或金属软管一直要延伸到变频器的控制端子处,以保证信号线与动力线的彻底分开。 1、模拟量控制信号线应使用双股绞合屏蔽线,电线规格为0.75mm2。在接线时一定要注意,电缆剥线要尽可能的短(5-7mm左右),同时对剥线以后的屏蔽层要用绝缘胶布包起来,以防止屏蔽线与其它设备接触引入干扰。 2、为了提高接线的简易性和可靠性,推荐信号线上使用压线棒端子。 张力控制系统中的张力控制与变频
1.力控制原理。以造纸机的张力控制为例,在图1a)所示的张力控制示意图中,传动电动机M的张力实际值是位于它前面的张力传感器的实际值。通过检测该处的张力情况,来控制传动电动机M的速度,从而形成一个张力闭环。电动机M的速度加快,则纸幅拉紧,张力的实际值就会上升;相反,速度降低,则纸幅松垂,张力的实际值就下降。
在这里,纸幅张力的设定值为T设定,实际值为T实际,经过张力控制器(T-控制)的PID调节器后,再乘以3%的偏移量,作为该传动点速度设定值的一个组成部分。原来传动的速度设定值(V设定)加上该组成部分,就是速度环(V-控制)的输入值,然后即可进行速度控制。在这里设置3%偏移量的目的就是通过传动速度的改变而使张力得到有效的控制。
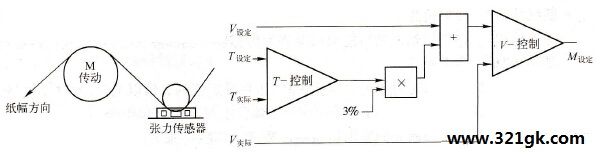
图1 张力控制示意图
在图1b)所示的张力控制原理中,T-控制就是张力控制模块的实现,包括自动和手动两种方式。张力控制模块投运前需先检测判定现在的张力实际值是否在可投运的范围之内,否则就不能投运,此时按手动投运按钮或当自动投运信号为“1”时,即进入张力控制模块的循环中。张力PID模块的退出,它的条件为相关部位检测到断纸信号或按手动退出按钮。
①读取张力设定值。张力设定值的输入可从工艺控制台上进行,并可通过脉冲开关的动作对设定值微调,以符合实际纸幅稳定运行的需要。
②读取张力实际值。张力实际值的产生是从PLC的模拟量板中获取的,调用相应的功能块程序。本过程读取张力的模拟量值后,在输出端得到标准化的量值,并可通过“高限”和“低限”参数来设置量程。从模拟量输入板读出的模拟量值首先变换为右边对齐的定点数(以标称范围为基础)。
③张力控制投入判断。张力控制是否投入取决于工艺的需要和纸幅是否已经上卷,纸幅是否断裂,在其他逻辑块中进行手动按钮投入或自动信号投入的设定,以及自动退出。因此这里需要判断张力控制是否投入,如已投入,则进入张力PID控制模块,否则就只显示数值和信息,不进行控制。
④张力PID控制模块。张力PID控制模块可以调用标准的功能块,以执行闭环控制系统。PID算法是在特殊的时间采样分隔下调用的,并产生操作变量。采样间隔时间越短观察得越精确,控制器完成任务就越精密。因此,在接口数据块中指定的控制参数必须适应于采样周期。
⑤显示张力设定实际值。负责将张力的设定值和实际值显示在工艺控制台上。
⑥分析效果信息提示。在软件设计中,应该对张力系统的实际运行效果进行分析并提示信息。
·断纸状态时,如果检测到某点的张力实际值与基准零点的偏差值过高则显示“张力零点偏移”。出现该情况的可能原因有张力传感器检测故障,张力信号放大器零位漂移,轴承支座卡死等。
·正常出纸时,张力瞬时值超过设定值过高,达到设定值的2倍以上时,此时提示“张力实际值HH”。出现该情况将预示该处纸幅紧度过高将引起断纸。
·正常出纸时,张力控制器的输出值振幅过宽,此时提示“张力控制输出值HH”。出现该情况表明纸幅纵向波动大,需对多点的速度值进行调整。

图2 张力控制软件流程图
在某纸厂的多点纸幅张力控制中,我们选取了其中的一点进行测试(如图3示)。横坐标为时间,纵坐标为张力实际值的百分比。以断纸时间开始(0s),一直处于纸幅断裂状态,则张力实际值一直为“0”;从44s开始进行引纸,随着纸幅从半幅到全幅,张力实际值也逐渐快速上升并呈不规则波动;在98s时,进行张力控制模块的投运,因为是PID控制,先出现明显的超调和振荡,然后超调量减小,最后张力的实际输出值慢慢接近设定值( 67%)。当然,选取合适的参数值甚至再增加合适的回路,将会进一步减少超调量和振荡周期,使纸幅的张力值稳定在允许的范围之内。
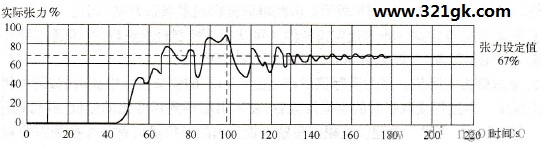
图3 张力控制效果
(责任编辑:admin) |