誉达PLC温度PID自整定功能及例程介绍
时间:2017-06-22 19:29 来源:未知 作者:admin 点击:次
PID运算指令说明: 此指令用于进行PID控制的PID运算程序。 S1:设定的目标值; S2:当前值(反馈回来的值); S3:PID控制参数,占用S3开始的连续22个D寄存器。
PLC控制温度例程: 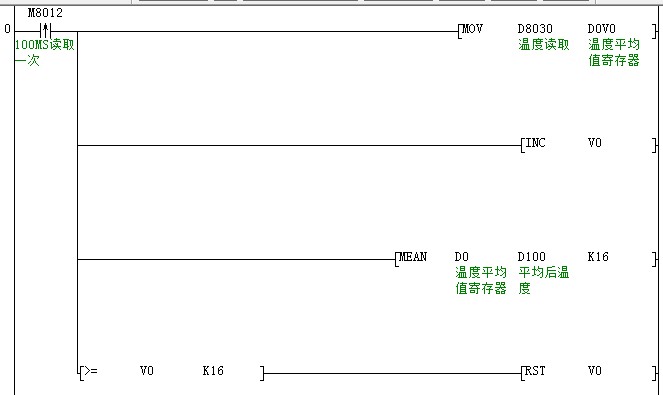 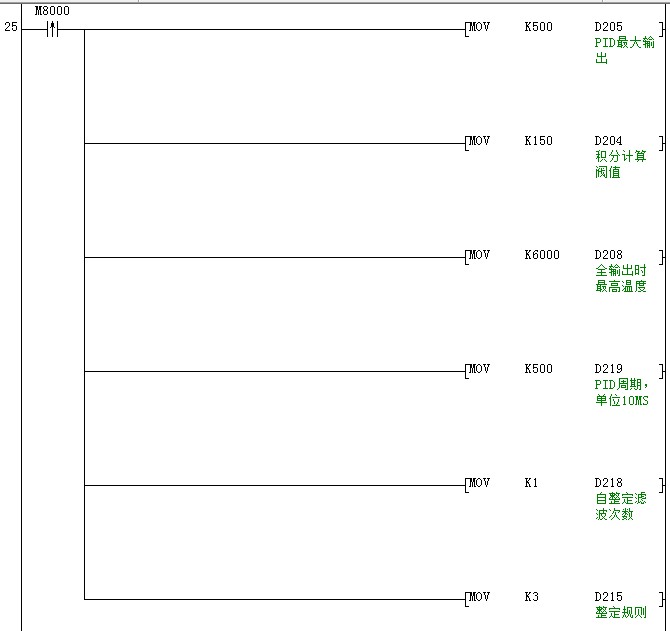 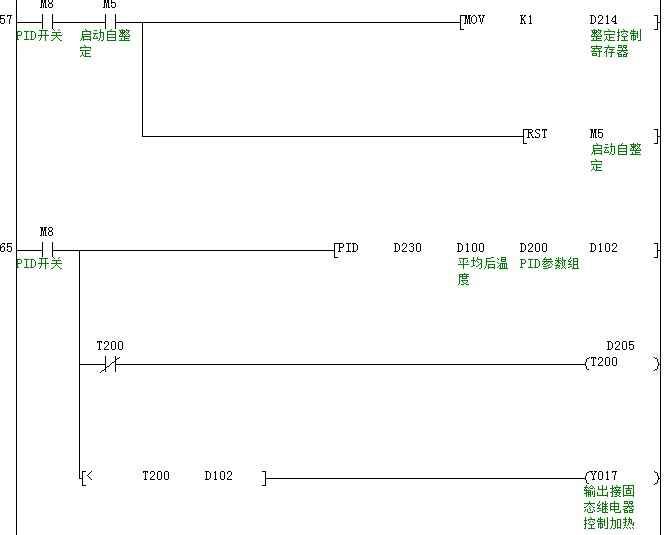 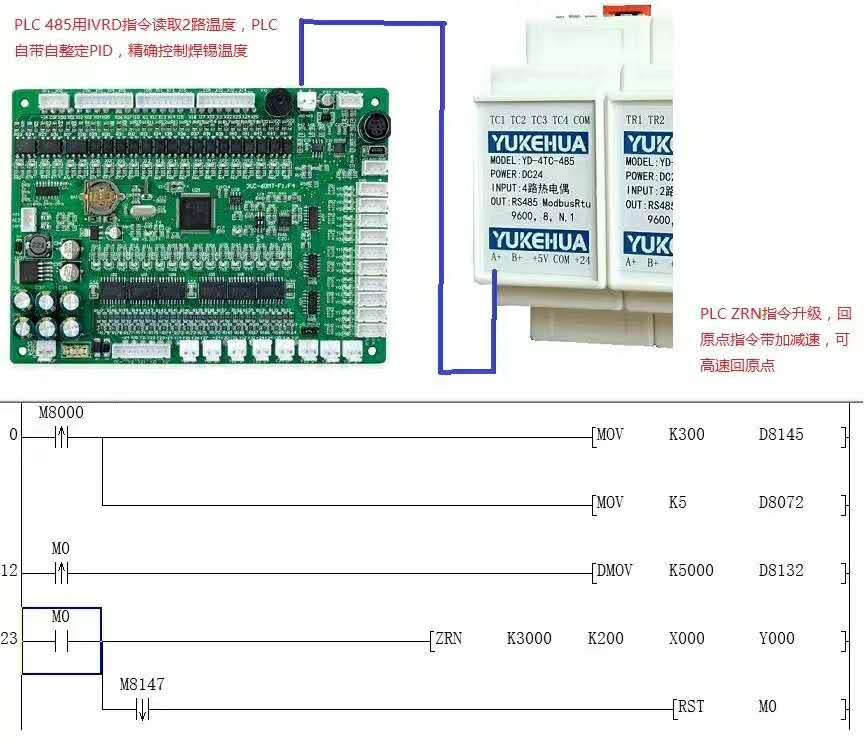 (责任编辑:admin) |
| PID运算指令说明: 此指令用于进行PID控制的PID运算程序。 S1:设定的目标值; S2:当前值(反馈回来的值); S3:PID控制参数,占用S3开始的连续22个D寄存器。
PLC控制温度例程: (责任编辑:admin) |