单片机编程注意事项-单片机SPI通信接口
时间:2017-03-01 11:17 来源:未知 作者:admin 点击:次
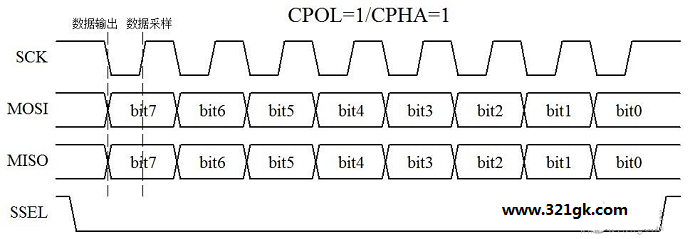
| 在单片机编程的过程中,如果一名设计者能够同时掌握多门编程语言,那么这名设计者肯定是一位非常优秀的人才。但是想要同时精通汇编、C语言、C++这三门语言实在是太难了,很多初学者在其中一门的学习中就已经到处碰壁,苦不堪言。本文特意为大家整理了拥有嵌入式编程领域多年工作经验的工程师意见,汇总成了一篇能够对嵌入式编程经验有着指导意义的注意事项,感兴趣的朋友快来看一看吧。 在单片机嵌入式编程中,最难的两部分是interrupt和MM(memorymanage),之所以有人觉得并不困难,那是因为太多数情况下芯片制造商都已经直接写好,但是如果设计者本身就在为芯片制造商工作,那就必须自己会写配置文件。 这两个东西之所以比较难是因为要用汇编或类C来写,属于比较低层的东西,中断有外部中断和内部中断,外部中断有两种实现模式,硬件中断模式和软件中断模式,相对来说比较简单,属于应用层面的,相比之下,内部中断就要复杂得多,内部中断主要是发生重起,总线出错、溢出、校验出错等情况产生的,很多软件开发人员基本上不写对应的中断服务程序,因为它太难了而且一般也用不到。但是一旦发生,那就是致命错误,因此从整个系统健壮性来考虑必须要有相应的ISR才行,这也是freescale的专家建议的,因所以下面就谈一下嵌入式编程应该注意的问题。 延时 嵌入式编程经常会涉及到硬件的操作,如ADC,打开或者关闭一个电流源,这些都是需要时间的,因此当在发出这些指令的时候立即读取寄存器的值是得不到想要的结果的,而且还找不出原因,有时候需要的延时还比较长,达到ms级,一般情况下us级就够了,根据各芯片的时钟频率而定,不单指MCU的总线时钟频率。 变量 一般来说如果非常明确某个变量的作用域和生命周期就应该定义相对的变量,如const、static等,这样不容易出错,不建议将所有变量都定义成全局变量,这样管理起来比较麻烦,程序一旦出错,破坏性也比较大,函数也是如此,全局变量和通用函数一定要申明,这样在调用的时候不容易出错,而且有些编译器对于未申明的函数是不会报错的,但在调用的时候又会发出类型隐含转换的警告,在这里就不举例子了,总之这点要特别小心。 宏定义 在程序编写过程对于一些特定的数字应该尽量使用宏定义,这样做有个好处就是比较直观,便于日后维护,要不然时间久了看到那个数字根本就想不起它代表什么意思,宏定义并不会给程序带来任何负担,因为它在编译的时候就已经全部替代了,所以尽可以广而用之。值得一提的是宏定义并不局限于使用常量,它可以定义函数,因为它是直接替换,因此避免了入栈和出栈,提高了程序执行的效率,当时同时增加了代码量,因此一般用比较简单的函数,它还有一个缺点是在替换的过程不检查参数类型是否正常,从而增加了安全隐患,解决此问题的方法是使用一个称之为inline的内联函数,它继承了宏定义的优点,又弥补了它的缺点,是个最佳的选择,但是这个属于C++的范畴,有一定的难度,在这里也不多讲,有兴趣的朋友可以参考一下相关资料。 浮点运算 大多数低档次的单片机都是不支持浮点运算的,因此在实际使用过程中也很少用到,因此为了降低成本,一般都去掉了浮点运算模块,这就带来了一个问题,如果万一要用到浮点运算怎么办?细心的朋友可能会发现,即使不具有浮点运算的单片机在仿真调试过程依然可以使用floatordouble的数据类型进行计算,而且结果也很准确,这是为什么呢?这个因为编译器自动调用了库函数来实现的,一般是通过迭代的方法,因此它的执行效率非常慢,不建议采用此方法,而通常采用的是“定点”的方法来解决这个问题,比如说一个32bit的数据,可以假定它的低8位是小数位,然后移位计算,类似于整数运算,这种方法比较复杂,但是可以非常精确,还有一种方法就是直接放大10的N次方倍进行整数的计算,可以得出近似值,因此为了不增加不必要的麻烦,应该总是尽量避免使用浮点运算,一般情况也都是可以避免的。 watch dog 以三重watch dog为例,watch dog1检查时钟频率,watch dog2监视一小段代码,它必须在一个比较短的时间里喂一次,一般要求在250us到650us之间喂一次,watch dog3监视一大段代码,要求在比较长的时间内喂一次,一般是100ms以内,三个条件必须同时满足才行,这要求对代码的执行过程非常清楚,或者将导致喂狗出错重起。 这里需要向大家强调的是,在单片机嵌入式的编程过程中程序的好坏往往是由细节决定的,一个程序写的是否详细、灵活,是与日积月累的知识积累与实际磨练成正比的。虽然编程是意见非常枯燥甚至乏味的过程,但成功后的喜悦能够让大家相信这份付出是值得的。 单片机SPI通信接口 SPI 是英语 Serial Peripheral Interface 的缩写,顾名思义就是串行外围设备接口。SPI 是一种高速的、全双工、同步通信总线,标准的 SPI 也仅仅使用 4 个引脚,常用于单片机和 EEPROM、FLASH、实时时钟、数字信号处理器等器件的通信。SPI 通信原理比 I2C要简单,它主要是主从方式通信,这种模式通常只有一个主机和一个或者多个从机,标准的 SPI 是 4 根线,分别是 SSEL(片选,也写作 SCS)、SCLK(时钟,也写作 SCK)、MOSI(主机输出从机输入Master Output/Slave Input)和 MISO(主机输入从机输出 Master Input/Slave Output)。 SSEL:从设备片选使能信号。如果从设备是低电平使能的话,当拉低这个引脚后,从设备就会被选中,主机和这个被选中的从机进行通信。 SCLK:时钟信号,由主机产生,和 I2C通信的 SCL 有点类似。 MOSI:主机给从机发送指令或者数据的通道。 MISO:主机读取从机的状态或者数据的通道。 在某些情况下,我们也可以用 3 根线的 SPI 或者 2 根线的 SPI 进行通信。比如主机只给从机发送命令,从机不需要回复数据的时候,那么 MISO 就可以不要;而在主机只读取从机的数据,不需要给从机发送指令的时候,那 MOSI 就可以不要;当一个主机一个从机的时候,从机的片选有时可以固定为有效电平而一直处于使能状态,那么 SSEL 就可以不要;此时如果再加上主机只给从机发送数据,那么 SSEL 和 MISO 都可以不要;如果主机只读取从机送来的数据,SSEL 和 MOSI 都可以不要。 3 线和 2 线的 SPI 大家要知道怎么回事,实际使用也是有应用的,但是当我们提及 SPI的时候,一般都是指标准 SPI,都是指 4 根线的这种形式。 SPI 通信的主机也是我们的单片机,在读写数据时序的过程中,有四种模式,要了解这四种模式,首先我们得学习以下两个名词。 CPOL:Clock Polarity,就是时钟的极性。时钟的极性是什么概念呢?通信的整个过程分为空闲时刻和通信时刻,如果 SCLK 在数据发送之前和之后的空闲状态是高电平,那么就是CPOL=1,如果空闲状态 SCLK 是低电平,那么就是 CPOL=0。 CPHA:Clock Phase,就是时钟的相位。 主机和从机要交换数据,就牵涉到一个问题,即主机在什么时刻输出数据到 MOSI 上而从机在什么时刻采样这个数据,或者从机在什么时刻输出数据到 MISO 上而主机什么时刻采样这个数据。同步通信的一个特点就是所有数据的变化和采样都是伴随着时钟沿进行的,也就是说数据总是在时钟的边沿附近变化或被采样。而一个时钟周期必定包含了一个上升沿和一个下降沿,这是周期的定义所决定的,只是这两个沿的先后并无规定。又因为数据从产生的时刻到它的稳定是需要一定时间的,那么,如果主机在上升沿输出数据到 MOSI 上,从机就只能在下降沿去采样这个数据了。反之如果一方在下降沿输出数据,那么另一方就必须在上升沿采样这个数据。 CPHA=1,就表示数据的输出是在一个时钟周期的第一个沿上,至于这个沿是上升沿还是下降沿,这要视 CPOL 的值而定,CPOL=1 那就是下降沿,反之就是上升沿。那么数据的采样自然就是在第二个沿上了。 CPHA=0,就表示数据的采样是在一个时钟周期的第一个沿上,同样它是什么沿由 CPOL决定。那么数据的输出自然就在第二个沿上了。仔细想一下,这里会有一个问题:就是当一帧数据开始传输第一个 bit 时,在第一个时钟沿上就采样该数据了,那么它是在什么时候输出来的呢?有两种情况:一是 SSEL 使能的边沿,二是上一帧数据的最后一个时钟沿,有时两种情况还会同时生效。 我们以 CPOL=1/CPHA=1 为例,把时序图画出来给大家看一下,如图1 所示。
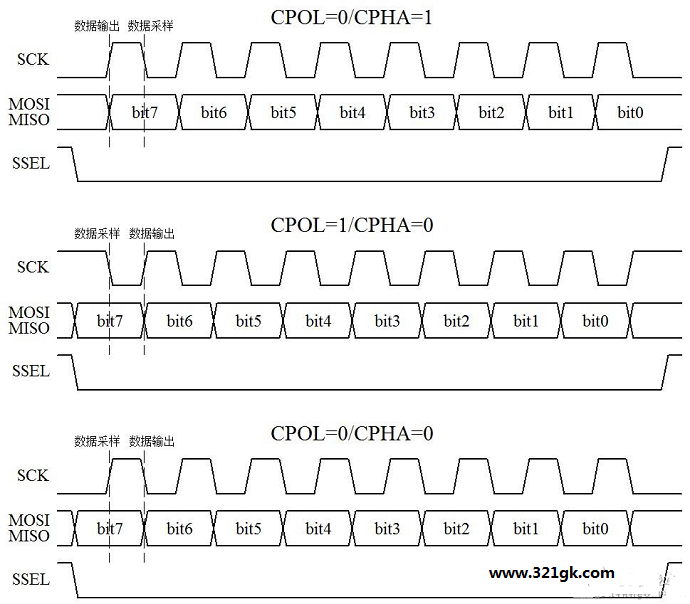
图1 SPI 通信时序图(一) 大家看图1 所示,当数据未发送时以及发送完毕后,SCK 都是高电平,因此 CPOL=1。可以看出,在 SCK 第一个沿的时候,MOSI 和 MISO 会发生变化,同时 SCK 第二个沿的时候,数据是稳定的,此刻采样数据是合适的,也就是上升沿即一个时钟周期的后沿锁存读取数据,即 CPHA=1。注意最后最隐蔽的 SSEL 片选,这个引脚通常用来决定是哪个从机和主机进行通信。剩余的三种模式,我们把图画出来,简化起见把 MOSI 和 MISO 合在一起了,大家仔细对照看看研究一下,把所有的理论过程都弄清楚,有利于你对 SPI 通信的深刻理解,如图2 所示。
图2 SPI 通信时序图(二) 在时序上,SPI 是不是比 I2C要简单的多?没有了起始、停止和应答,UART 和 SPI 在通信的时候,只负责通信,不管是否通信成功,而 I2C却要通过应答信息来获取通信成功失败的信息,所以相对来说,UART 和 SPI 的时序都要比 I2C简单一些。 (责任编辑:admin) |