怎样才能降低步进电机振动和噪音
时间:2018-08-29 07:44 来源:未知 作者:admin 点击:次
与驱动电路有关的方法步进电机的振动噪音由驱动电路引起的原因如下:
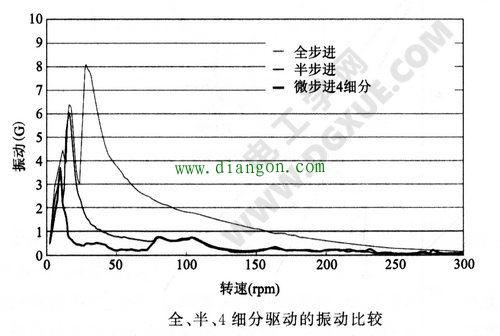
其中(1)的高次谐波为主要原因。步进电机使用方波电流驱动,必然含有大量的高次谐波,由此产生振动和噪音。因此驱动电流最好为正弦波。接近正弦波的驱动方法有步进电机的细分步进驱动。下图为电机1/4细分、半步、整步驱动的振动比较,其振动为依次增加的。
与电机有关的方法步进电机的振动噪音由步进电机本体引起的原因如下:
除此之外,还要考虑以下原因:
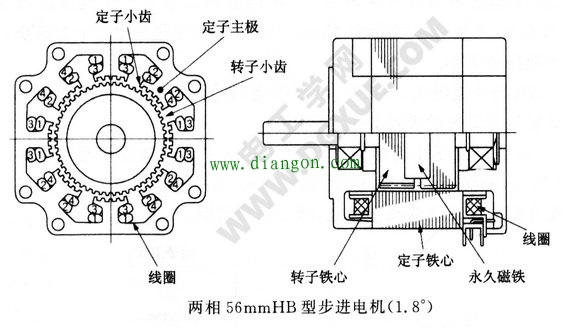
上述中,与电机有关的降低振动和噪音效果好的方法如下: 提高定子的刚度两相56mmHB型步进电机(1.8°)的结构如下图所示:
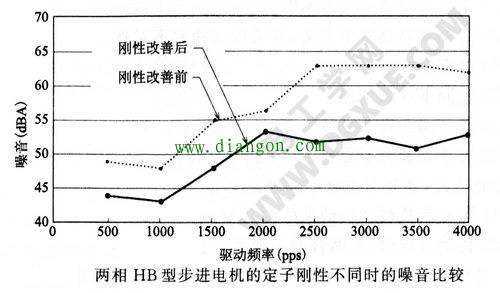
转子直径减小约10%,定子壳体增加10%,提高定子的刚性后与原设计相比,其振动噪音如下图所示得以改善。
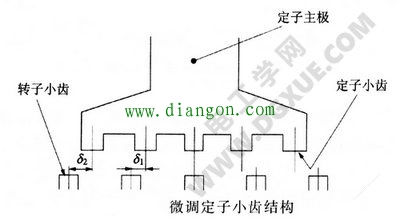
步进电机产生噪音的原因,主要有高次谐波产生的电磁力,定子刚度不够,定子主极对转子产生的吸引力,引起定子的微小变形等。 定子的多主极定子刚度与噪音之间的关系如上图所示,定子主极吸引转子才使定子发生微小变形,也为产生噪音的原因。如上(两相56mmHB型步进电机结构图)所示,两相HB型有8个主极。两相时定子主极数为4、8、16,三相时主极数为3、6、9、12等。一般主极数越多,低速转矩越低,高速响应能力越好,线圈越小,振动噪音越得以改善。 下面以伺服步进电机(VR型的步进电机)为例,介绍降低振动、噪音的方法。定子的主极数为三相6极或三相12极,分析径向引起的振动,可以得到降低噪音的解决方法,可以看到6极有6个地方磁场变化,12极有12个地方磁场变化,然而12个极处的变化量比6个极的小,所以产生的振动就小。 HB型步进电机,主极越多,线圈绕制的时间越长,费用越高,但主极的增加是降低振动噪音的一种手段。 微调定子小齿结构降低激磁磁通中高次谐波的有效手段,如如下图所示,是使转子齿相对定子齿的节距为不等距角δ1、δ2等,通过不同角度方法降低磁通的高次谐波,减小齿槽转矩。
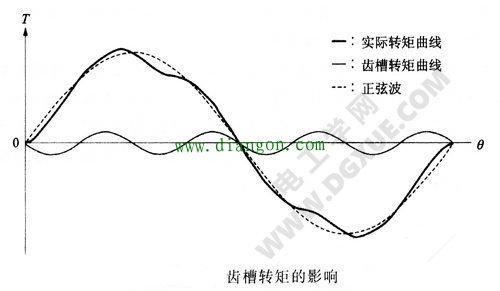
两相电机时,齿槽转矩由四次谐波构成,设计时主要考虑消除四次谐波。定子与转子齿距进行微小变化,使部分交链磁通减小,距角特性的峰值转矩减小。目前,销售的两相步进电机,除特殊用于制动等方面,一般均采用微调节距或改变形状构造,减小齿槽转矩。 下图为两相步进电机的例子,齿槽转矩使距角特性产生畸变。两相电机的齿槽转矩为距角特性周期的1/4,即变成四次谐波。定子电流与永久磁铁转子磁通的距角特性的理论值为虚线所示的正弦波,此曲线叠加上齿槽转矩产生的四次谐波,合成为粗线描述的畸变转矩曲线,距角特性畸变,则成为非正弦波,引起位置定位精度变差,振动和噪音变大。齿槽转矩的相位由定子与转子齿相对位置关系决定,定子与转子齿的微小位置偏移,使各齿产生的四次谐波的相位发生微小变化,起到互相抵消的作用,从而减小齿槽转矩。
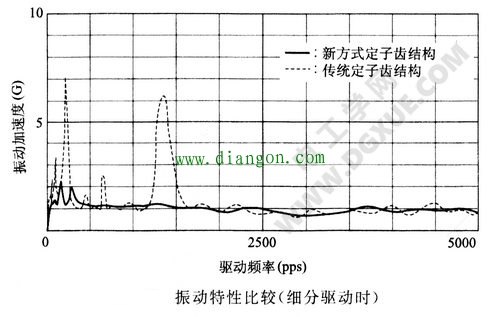
上图(微调定子小齿结构)所示的微调方式,定子与转子齿的齿形及相位角δ的偏移量,是各个电机生产厂家重点研究的地方。日本伺服公司对有无微调的电机特性进行了以下比较。 下图表示两相步距角1.8°的步进电机在有和没有微调情况下的细分驱动时的速度-振动特性。无微调电机细分驱动时,如虚线所示,低速区域或中速区域可看到振动的峰值,而使用微调方式,可消除其中大部分的振动。
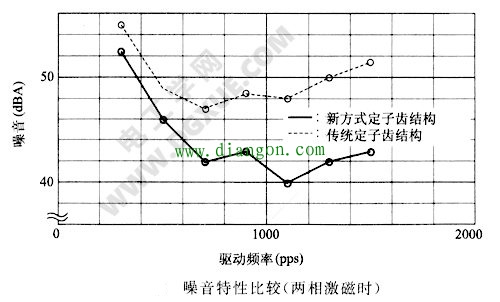
其次,比较这两个电机在两相激磁驱动方式下的速度-噪声特性,如下图所示。比较看出,使用微调偏移方式的噪音得到大幅改善。电机速度越快,噪音的降低效果越明显。
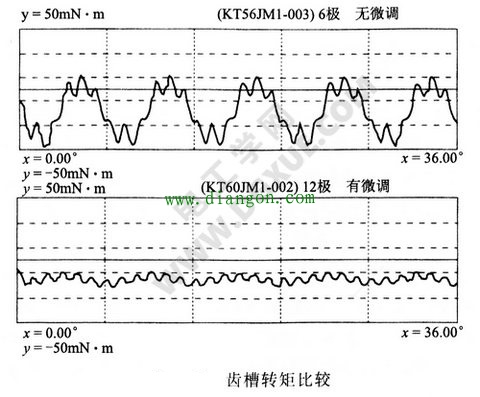
对三相HB型步进电机进行比较,下图为有无采用微调偏移方法的特性曲线。此图中,上图为三相HB型1.2°、6主极,无微调偏移的齿槽转矩;下图为三相HB型1.2°、12主极,有微调偏移的齿槽转矩。三相HB型步进电机,同一步距角的电机的齿槽转矩比较,定子极数多,微调偏移效果好,12主极1.2°的产品齿槽转矩减小17.4%。
安装减震器可以降低噪音步进电机安装在机器上时,在固定电机处可垫硬质橡胶等减震器材,以便阻止与底板产生的共振。此种方法降低噪音效果明显,被广泛使用。具体方法有两种:一种为用厚度为几mm的硬质橡胶将安装步进电机的前面钢板夹成三明治状态,作为步进电机的前面连接板使用;另一种是将两片钢板用硬质橡胶像三明治那样连接,置于步进电机与安装设备之间。这些称为装置减震器,其降低噪声效果明显,但步进电机要依靠安装底板散热,而橡胶材料的热传导性能差,所以要注意电机温升。 (责任编辑:admin) |