梯形图上编程几个小时的程序,在这里几分钟就能轻松搞定。
誉达PLC代替数控系统及应用于机械手动作示教控制。主要用到两条指令(FLRD,FLWR)就可实现,简单易用。几分钟可以在触摸屏上面组态动作,或者用手机APP组态动作,通过PLC内置WIFI模块更新动作数据。
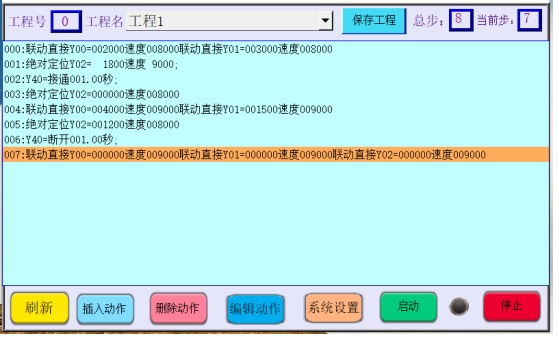
注:该例子模拟机械手注塑机动作,组态好动作如上图。Y0用于X轴,Y1用于Y轴,Y2用于Z 轴。首先XY轴走到设定(物件)位置,Z轴下降到设定位置,Y40用于夹具或电磁铁,Y40接通1秒夹住物件,Z轴回0位,XY轴行走到物件放置坐标,Z轴下行到一定高度,Y40松开,XYZ三轴联动插补同时回到0位继续等待。3分钟在触摸屏上搞定这些动作,梯形图编程的话要多久!!!
YUKEHUA PLC机械手动作组态说明
一、动作组态保存指令:

1、指令说明:
第一个参数D280:占用4个寄存器,D280-283。D282为1时刷新触摸屏动作显示,D283为总流程步数。组态的动作流程要保存进第几号,执行动作时从0步流程开始执行。
第二个参数R0:当前动作组态显示内容,可以在触摸屏上面做个项目选单元件显示。
R0-99显示当前动作,R100-199显示第一个动作,R200-299显示第二个动作,以此类推。
第三个参数D200:组态动作具体参数。从D200开始到D207,一个动作占用8个寄存器。
第四个参数D5000:指定D5000开始用于保存组态动作流程。
第五个参数K6:指定一个流程最多可以同时执行多少个动作。该参数设6,就是一个流程最多可以同时执行6个动作,由于一个动作需要8个寄存器参数,要保存6个动作为一个流程,要用到48个寄存器,第二个参数就要从D200至D247。
2、第二个参数格式具体说明:
●脉冲输出动作组态参数:

|
D200+0 |
D200 |
执行动作代码
0:没有动作;6:绝对定位;
7:相对定位;8:原点回归;
9:多轴联动间接地址;
10:多轴联动直接数据;
11:连续坐标多轴联动间接地址;
12:圆弧插补; |
|
D200+1 |
D201 |
指定动作输出口 |
|
D200+2 |
D202 |
指定脉冲输出方向口 |
|
D200+3 |
D203 |
动作6为原点开关输入点,
动作11为连续插补坐标数 |
|
D200+4 |
D204,D205 |
脉冲目标位置,32位 |
|
D200+6 |
D206,D207 |
脉冲输出频率,32位 |
|
绝对定位例子,Y0作为脉冲输出口,Y20作为脉冲方向口 |
|
D200+0 |
D200 |
动作代码:6 |
|
D200+1 |
D201 |
脉冲输出:0 |
|
D200+2 |
D202 |
脉冲方向:20 |
|
D200+4 |
D204,D205 |
绝对定位目标位置:2000 |
|
D200+6 |
D206,D207 |
绝对定位脉冲运行频率:32000 |
|
原点回归例子,Y0作为脉冲输出口,Y20作为脉冲方向口,X0作为原点开关 |
|
D200+0 |
D200 |
动作代码:6 |
|
D200+1 |
D201 |
脉冲输出:0 |
|
D200+2 |
D202 |
脉冲方向:20 |
|
D200+3 |
D203 |
原点输入X:0 |
|
D200+6 |
D206,D207 |
原点回归运行频率,自动加减速,启动频率与停止频率为该频率除10 |
|
多轴联动直接数据例子,Y0-2作为脉冲输出口,Y20-22作为脉冲方向口 |
|
D200+0 |
D200 |
动作代码:10 |
|
D200+1 |
D201 |
脉冲输出:0 |
|
D200+2 |
D202 |
脉冲方向:20 |
|
D200+4 |
D204,D205 |
Y0目标位置:2000 |
|
D200+6 |
D206,D207 |
Y0运行频率:32000 |
|
|
|
|
|
D208+0 |
D208 |
动作代码:10 |
|
D208+1 |
D209 |
脉冲输出:1 |
|
D208+2 |
D210 |
脉冲方向:21 |
|
D208+4 |
D212,D213 |
Y1目标位置:3000 |
|
D208+6 |
D214,D215 |
Y1运行频率:32000 |
|
|
|
|
|
D216+0 |
D216 |
动作代码:10 |
|
D216+1 |
D217 |
脉冲输出:2 |
|
D216+2 |
D218 |
脉冲方向:22 |
|
D216+4 |
D220,D221 |
Y2目标位置:1500 |
|
D216+6 |
D222,D223 |
Y2运行频率:32000 |
|
多轴联动连续坐标间接地址例子,Y0-2作为脉冲输出口,Y20-22作为脉冲方向口,连续坐标数据位于D1000开始的寄存器里面。 |
|
D200+0 |
D200 |
动作代码:11 |
|
D200+1 |
D201 |
脉冲输出:0 |
|
D200+2 |
D202 |
脉冲方向:20 |
|
D200+3 |
D203 |
连续插补坐标数:3 |
|
D200+4 |
D204 |
Y0目标位置:1000(间接地址);
目标位置=基地址+(总坐标数*2 *当前坐标号);
坐标0目标位置=D[1000+(3*2*0)],也就是D1000里的数据;
坐标1目标位置=D[1000+(3*2*1)],也就是D1006里的数据;
坐标2目标位置=D[1000+(3*2*2)],也就是D1012里的数据; |
|
D200+6 |
D206,D207 |
Y0运行频率:32000 |
|
|
|
|
|
D208+0 |
D208 |
动作代码:11 |
|
D208+1 |
D209 |
脉冲输出:1 |
|
D208+2 |
D210 |
脉冲方向:21 |
|
D208+3 |
D211 |
连续插补坐标数:3 |
|
D208+4 |
D212 |
Y1目标位置:1002(间接地址);
目标位置=基地址+(总坐标数*2 *当前坐标号);
坐标0目标位置=D[1002+(3*2*0)],也就是D1002里的数据;
坐标1目标位置=D[1002+(3*2*1)],也就是D1008里的数据;
坐标2目标位置=D[1002+(3*2*2)],也就是D1014里的数据; |
|
D208+6 |
D214,D215 |
Y1运行频率:32000 |
|
|
|
|
|
D216+0 |
D216 |
动作代码:11 |
|
D216+1 |
D217 |
脉冲输出:2 |
|
D216+2 |
D218 |
脉冲方向:22 |
|
D216+3 |
D219 |
连续插补坐标数:3 |
|
D216+4 |
D220 |
Y2目标位置:1004(间接地址);
目标位置=基地址+(总坐标数*2 *当前坐标号);
坐标0目标位置=D[1004+(3*2*0)],也就是D1004里的数据;
坐标1目标位置=D[1004+(3*2*1)],也就是D1010里的数据;
坐标2目标位置=D[1004+(3*2*2)],也就是D1016里的数据; |
|
D216+6 |
D222,D223 |
Y2运行频率:32000 |
●开关量输出Y动作组态参数:

|
D200+0 |
D200 |
执行动作代码
0:没有动作;3:Y输出; |
|
D200+1 |
D201 |
指定Y输出口 |
|
D200+2 |
D202 |
输出动作方式:
0:Y接通 1:断开 2:Y先接通后延时
3:先延时后接通4:接通到限位
5:接通到限位断开
6:Y先接通后延时断开 7:断开后延时 |
|
D200+3 |
D203 |
指定X限位开关输入点 |
|
D200+4 |
D204 |
延时时间 |
|
D200+6 |
D206,D207 |
|
|
Y10接通例子 |
|
D200+0 |
D200 |
动作代码:3 |
|
D200+1 |
D201 |
Y输出:10 |
|
D200+2 |
D202 |
输出动作方式:0 |
|
Y10接通2秒后转下一步 |
|
D200+0 |
D200 |
动作代码:3 |
|
D200+1 |
D201 |
Y输出:10 |
|
D200+2 |
D202 |
输出动作方式:2 |
|
D200+4 |
D204 |
延时时间(10MS):200 |
|
Y10接通,到限位X10接通,Y10断开 |
|
D200+0 |
D200 |
动作代码:3 |
|
D200+1 |
D201 |
Y输出:10 |
|
D200+2 |
D202 |
输出动作方式:5 |
|
D200+3 |
D203 |
限位开关输入点:10 |
●开关量输入X动作组态参数:

|
D200+0 |
D200 |
执行动作代码
0:没有动作;2:X输入; |
|
D200+1 |
D201 |
指定X输入点 |
|
D200+2 |
D202 |
输入动作方式:
0:X接通进入下一步
1:X接通断开进入下一步
2:X接通后延时进下一步
3:X断开后延时进下一步 |
|
D200+4 |
D204 |
延时时间 |
|
X10接通例子 |
|
D200+0 |
D200 |
动作代码:2 |
|
D200+1 |
D201 |
X输入:10 |
|
D200+2 |
D202 |
输入动作方式:0 |
|
X10接通2秒后转下一步 |
|
D200+0 |
D200 |
动作代码:2 |
|
D200+1 |
D201 |
X输入:10 |
|
D200+2 |
D202 |
输入动作方式:2 |
|
D200+4 |
D204 |
延时时间(10MS):200 |
●D寄存器动作组态参数:

|
D200+0 |
D200 |
执行动作代码
0:没有动作;5:D寄存器动作组态; |
|
D200+1 |
D201 |
指定寄存器地址 |
|
D200+2 |
D202 |
动作方式
0:等于 1:大于 2:小于
3:大于等于 4:小于等于
5:递增1 6:递减1 7:设定常数 |
|
D200+4 |
D204,D205 |
动作方式0-4为与寄存器比较的常数
动作方式5-7为设定寄存器的数值 |
|
D200+6 |
D206 |
该值为跳转的流程步 |
|
D200等于指定值500转8步 |
|
D200+0 |
D200 |
动作代码:5 |
|
D200+1 |
D201 |
寄存器地址:200 |
|
D200+2 |
D202 |
动作方式:0 |
|
D200+4 |
D204,D205 |
与寄存器比较的常数:500 |
|
D200+6 |
D206 |
跳转的流程步:8 |
|
D200递增1然后转6步 |
|
D200+0 |
D200 |
动作代码:5 |
|
D200+1 |
D201 |
寄存器地址:200 |
|
D200+2 |
D202 |
动作方式:5 |
|
D200+4 |
D204,D205 |
设定寄存器的数值:1 |
|
D200+6 |
D206,D207 |
跳转的流程步:6 |
|
D200设为3000然后转3步 |
|
D200+0 |
D200 |
动作代码:5 |
|
D200+1 |
D201 |
寄存器地址:200 |
|
D200+2 |
D202 |
动作方式:7 |
|
D200+4 |
D204,D205 |
设定寄存器的数值:3000 |
|
D200+6 |
D206,D207 |
跳转的流程步:3 |
二、执行组态动作指令:

注:M100在触摸屏上的启动按钮,从0步开始执行组态好的动作,执行到D283步停止,FLRD指令会自动复位M100。一个步有6个同步动作,M102为第一个同步动作的运行指示,M103为第二个同步动作的运行指示,以此类推。M107为第六个同步动作的运行指示。运行中置位M101,停止动作。
(责任编辑:admin) |