誉达PLC通过四条指令控制canopen伺服
时间:2024-04-02 14:45 来源:未知 作者:admin 点击:次
誉达PLC通过四条指令控制canopen伺服
PLC控制伺服常用指令和程序段总结
这是一个回原点指令,K20000表示刚开始回原点的脉冲频率,当检测到X12的上升沿后,脉冲输出频率降为3000。当再检测到X12的下降沿后,脉冲输出停止。脉冲输出端为Y0。
DDRVI相对定位指令
x2-------DDRVI K10000 K1000 Y0 Y2
意思为:当X2接通时,以当前的位置为起点,向Y0以1KHz的频率发送10000个脉冲,电机方向为正方向,并反应在Y2上。
一般伺服电机使用的最多的就是位置控制模式,其说明书上的接线 ,不要被吓到了,cn1是控制端口,cn2是编码器反馈端口,不用管,有专用线的。
实际上,只用控制cn1的32、33、34、35,4根线就好了,这四根线分两组,32和33作为脉冲输入,34和35作为方向输入。
举个例子:我们把32(plus+)接上+24v,把33(plus-)接上0V,把34(dir+)接上+24v,把35(dir-)接上0V,就接成了最简单的伺服系统,发现没有,其实外部三根线就可以了,我们把32和34接在一起, 共用电源正极。
不过,伺服是靠脉冲控制的,我们的线路只给伺服发了一个脉冲,而本套伺服是10000脉冲/转,那么它只转动了360/10000,呵呵,几乎没动一样,要使它连续运动,就要给它持续的脉冲,脉冲快,它转得快,脉冲多,它转得多。那么就用到PLC了。
我这里用的是誉达的plc:
(责任编辑:admin)   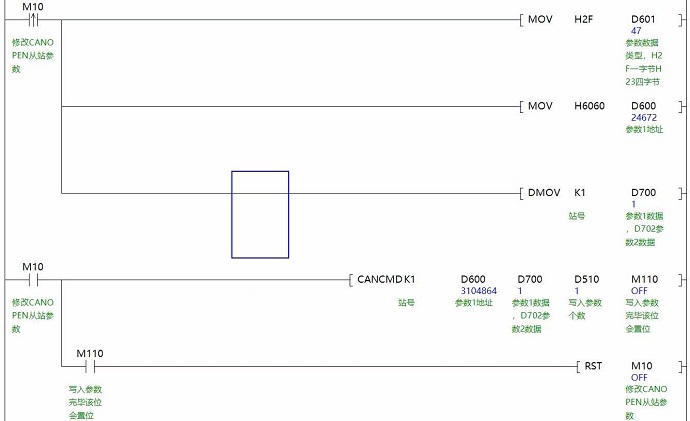 |