机器人自身问题:离开人类也许是“笨蛋” 众所周知,机器人是人类的智慧而研制出来帮助人类的一产物。机器人是又无数个零件、机械备件再加上一些程序而完成的,这是理解机器人制作最为简单的说法吧。机器人要运作,当然离不开程序,如果要问机器人的大脑在哪里?也许大脑就是那个复杂的程序吧。人类一旦拿开那个所谓的“大脑”机器人就无法操作,也许就成为一堆废铁、废零件。 机器人有一个“致命”的弱点,它只是一个机器,一个没有思维的机器。人类拥有它永远无法拥有的思维,也许你会说,MIT研制出的编辑机器人就能编写新闻。对于这一研发还是值得肯定,赞扬的。但是对于突发是新闻、事件等,机器人还是需要依靠人类。所以小编还是不会丢失工作。 人类的不允许,企业不敢“轻举妄动” 在近段时间,富士康又爆发一场员工罢工,此事件发生在富士康重庆厂区。这次罢工事件是由于富士康员工加班时间减少,减少了加班就等于工资降低。导致员工加班时间减少,是因为近几年来,富士康不断自动化优化,来提高效率。此事件让小编想到,富士康一直放话:百万机器人计划。试想,如果富士康真实现了“百万机器人”计划,也许富士康会爆发一次有史以来最大的“罢工”事件。毕竟机器人也只是一个机器,并没有人类心思的细腻,机器人并不能完成细小零件的安装。富士康某高层曾表示:机器人并不能取代富士康的员工,机器人只是进行辅助工作而已。机器人始终“斗”不过人类。 机器人成本太高,企业无法负担 一台工业机器人最少需要十几万,品牌工业机器人甚至需要几十万一台。如此高的价格,并不是一个中小企业能负担得起的。那么对于起来说换,还是不换?小编给大家算一笔账,假如一公司通过“机器换人”减少四分之一的人工,大概减少200人,按照现阶段的工资来算(3000—4000),200人相当于900万元。然而,减少200工人就需要补充一定量的机器人,按照一半来算,要拿出上千万的资金来购买工业机器人,花费远远高出前者。然而,这些花费并没有算上维修机器人的费用。让一个中小企业一次性拿出上千万的资金,还是有一定的困难。 当然一台机器人“寿命”也挺长,也许从长远来看,机器人更加占有优势。能提高效率,给企业带来更大利润。但是这是对于大型企业,一些中小企业还是无法负担。 国家政策的限制:期待人机合作 早在美国发明第一台工业机器人开始,美国失业率高达6.65%,政府开始担心发展机器人会造成更多人失业。但是机器人是工业的发展趋势。 “不可否认,有些先进的技术在短期内可以替代工人,但纵观历史,技术的进步是打开经济增长的钥匙。”在短期内,一些人的工作机会可能会被机器人抢走,但从长期来看,机器人反而会创造大量就业机会。 从2004年到2008年,德国的机器人总量增加了约2.3万台,同期的失业率从4%下降到1.8%;巴西的机器人总量增长约2000台,失业率从9%降至7%。从这些数据来看,机器人产量的增长不会造成大量失业,相反,更多的就业机会被创造出来。 随着科技的发展,机器注定会在越来越多的领域取代人工。不过,在机器面前,人仍然具有不可替代的优势,未来的世界,也必定是人与机器协作创造出来的世界。用双手生产价值的愉悦感,用智慧推动人类社会前进的使命感,是人类特有的情感和收获,这些永远不会被机器剥夺。 PLCopen集成PLC、机器人和运动控制编程 传统上,工业机器人使用复杂的专有语言编程,对外人来说是很难的,只有机器人程序员才能理解。运动控制器现在应用广泛多样,通常使用PC库或其他专有语言来编程,而plc倾向用梯形逻辑来编程。在今天的自动化环境中,PLC、运动控制器和机器人需要紧密集成。许多不同的组件集成到机器的设计中,而每种组件需要通过他们的专用语言才能呈现自己的特长。越来越多的最终用户要求把机器人、运动控制器和可编程控制器都用熟悉的PLC语言进行编程。这些语言对机器制造商的程序员更容易理解,也使最终用户的服务人员更容易维护。为了减少复杂性,协调这三个不同的平台的外观、感觉和功能,PLCopen工作组为运动控制已经拿出了一套标准化工具,能在plc编程环境下直接对运动控制编程。 PLC
在处理联动的运动时,典型的运动控制器无法与机器人控制器竞争。典型的运动控制器,如果你想把末端执行器移动到一个特定点,你必须为每个轴找出正确的位置。你需要对机器人和有机械连接机制的其他机器做的事情是使用反向运动学的方法来编程。使用时需要公式,在物理空间中,需要把特定点转换为各自的位置,描述每个关节(或轴)需要移动至所述机械连接机构的终点。同样,这些系统应用广泛多样,需要熟悉他们的特定编程环境。
机器人控制器已经设计为实现特定复杂机制的最佳控制。多数控制器为特定设备。制造商创建一种专门的语言编程,从平台到平台的变化很大。当控制设备使用为他们设计的控制库时,非常高效;然而,大多数都不能很好地进行通信、集成或编程。在过去,几乎专用的机器人控制器只支持的运动学和反向运动学。现在,很多常见的运动控制器提供机器人类型命令的某些子集,尤其在针对包装自动化的控制器。机器人控制器和运动控制器之间的界限正变得模糊,但仍然用不同的系统和不同的语言编程,需要程序员进行协调,设计通常用于特定目的。
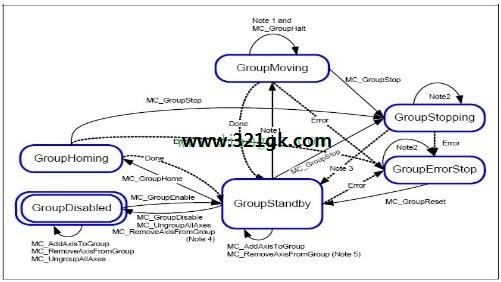
PLCopen运动标准的第四部分包含了用于协调运动的功能块。他们定义了一套标准化的功能块,用于3D空间内的复杂运动控制,包括运动转换的功能块。通常,这些转换必须由厂商提供,因此,对于大多数制造商,如果运动控制器不支持,就不能添加运动转换功能。 |
机器人再牛也永远不可能完全取代人类!机器人和运动控制编程
时间:2017-04-19 15:10来源:未知 作者:admin 点击:
次
机器人再牛也永远不可能完全取代人类!-PLCopen集成PLC、机器人和运动控制编程



顶一下
(0)
0%
踩一下
(0)
0%
------分隔线----------------------------
- 上一篇:什么是电动执行器 阀门电动执行器如何选型
- 下一篇:一体化电源系统小故障要怎样解决?
- 发表评论
-
- 最新评论 进入详细评论页>>