主流工业以太网协议-PROFINET 通信网络管理成本
时间:2016-05-30 11:50来源:未知 作者:admin 点击:
次
比较目前的五个主流工业以太网协议(Ethernet/IP,PROFINET,POWERLINK,EtherCAT,SERCOSIII),基于技术,实时性,标准化状态及市场方面的战略考量,例如:是否有一个用户组织在持续的进行着
比较目前的五个主流工业以太网协议(Ethernet/IP,PROFINET,POWERLINK,EtherCAT,SERCOSIII),基于技术,实时性,标准化状态及市场方面的战略考量,例如:是否有一个用户组织在持续的进行着协议的开发?该协议是否遵循IEC标准,且是否系统满足硬件实时的需求?
【实时性】
IEEE802.3以太网中存在的用于解决数据碰撞的机制带来了数据传输的延迟,为了达到实时性能,工业以太网协议采用了不同的方法去避免这种碰撞,对于硬实时,信号传输时间必须精确的按照时间帧来进行,或者他们可以触发一个错误机制。循环时间在数百个毫秒的系统应用对于软件实时是足够的,例如温度控制,而对于数字控制或运动控制应用经常需要其循环周期小于1mS。
【市场占有】
选择何种工业以太网系统进行比较的另一关键因素,是其市场占有情况:IMS和ARC的调研表明,大约四分之三的工业以太网使用Ethernet/IP,PROFINET,或Modbus/TCP,其次为POWERLINK和EtherCAT,这两个系统特别适合硬实时性要求。以下描述中不考虑Modbus/TCP,因其用户组织ODVA已经表明它将被集成到EtherNet/IP网络中。对于SERCOSIII,尽管它的市场份额比较小,但是,它在高速运动控制领域扮演着非常重要的角色。
【系统如何工作】
关于实时的不同方法,其中一个关键的区别在于,不同的工业以太网如何调度并管理数据传输使得网络可以提供实时性,EtherCAT和SERCOSIII的通信采用了集束帧方式:在每个周期,网络向所有的节点发送一个数据报文,从一个节点到另一个沿环形拓扑结构进行传输,同时采集每个节点的响应数据。相比之下,其他通信协议则使用独立报文给每个节点,而从站也通过独立报文进行应答。各系统使用三种不同的方法来实现实时性:1、一个主站控制网络上的时隙,在POWERLINK环境,主站授权每个节点独立发送数据,在EtherCAT和SERCOSIII网络,集束帧报文的传输跟随主站的时钟。2、PROFINET IRT使用同步开关控制通信过程。3、EtherNet/IP通过采用CIP Sync同步分发IEEE1588兼容的时钟信息给整个网络。
【PROFINET 通信】
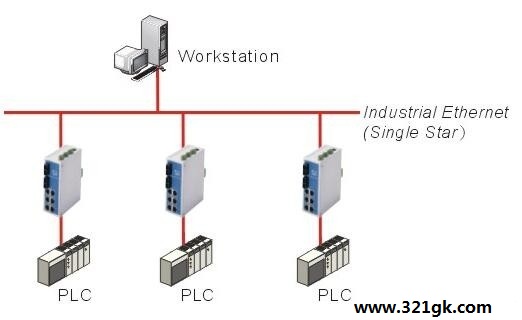
PROFINET(“过程现场网络”)按照对确定性的等级需求不同而采用不同的实现方法:PROFINET RT通常用于软实时或没有实时性要求的应用场合,而PROFINET IRT则针对硬实时应用。该技术由SIEMENS和PROFIBUS用户组织PNO的成员公司共同开发,它是基于以太网之上的PROFIBUS DP以及PROFINET I/O的成功应用:指定所有I / O 控制器之间的数据传输以及参数化,诊断,和网络的布局。为了覆盖不同的性能等级,PROFINET使得各协议和服务可自由采用生产者/消费者原则。高优先级的有效载荷数据通过以太网协议并以以太网帧VLAN的优先次序直接发送,而诊断和配置数据发送使用UDP/ IP。这使系统实现循环周期时间约10毫秒的I/O应用。对于时钟同步周期时间要求低于毫秒及运动控制应用,则提供PROFINET IRT,它实现了一个分时复用的硬件同步开关-所谓的动态帧包装(DFP),为用户提供一个新的PROFINET循环时间的优化设计并于2009年发布此特性。
【POWERLINK 通信】
POWERLINK最初由B&R开发并于2001年使用,EthernetPOWERLINK标准化组织(EPSG)是一个独立的用户组织并且遵循民主章程“,自2003年以来,负责该技术的进一步发展。POWERLINK是一个完全免专利费的技术,独立于供应商,采用纯软件方式的协议,却可达到硬实时的性能。在2008年,EPSG提供了该技术的开源版本。POWERLINK集成了完整的CANopen机制,并充分满足IEEE802.3以太网标准,即该协议提供了所有标准的以太网功能特点包括交叉通信和热插拔,允许网络以任意方式进行拓扑。它是如何工作?POWERLINK使用时隙和轮询混合方式来实现数据的同步传输。为进行协调,网络中指定plc或工业PC作为管理节点(MN)。该管理节点运行周期性时隙的调度并据此来同步所有网络设备,并控制周期性数据通信。所有其他设备运行为受控节点(CN)。在每个同步周期阶段,MN以固定的时间序列逐次向CN发送“轮询请求帧PReq”。(http://www.diangon.com/版权所有)每个CN以PRes方式立即响应这个请求并传输数据,”所有其他节点可以侦听这个响应。一个POWERLINK的周期包括三个部
分。在开始阶段,MN发送了循环启动SoC帧给网络中的所有节点,以同步网络中的所有设备。抖动大约20纳秒。周期性同步数据交换发生在第二个阶段,多路复用技术在这个阶段中可用于优化网络带宽。第三个阶段的标志是异步启动信号SoA,用于传输大容量,非时间苛刻的数据包。例如:用户数据或TCP/IP帧,均可在异步阶段进行传输。POWERLINK分为实时和非实时域。在异步阶段的数据传输支持标准的IP帧,通过路由器将实时域和非实时域数据隔离以确保数据安全。 POWERLINK非常适合各种自动化应用,包括I/O,运动控制,机器人任务,PLC与PLC间的通信,以及显示任务。多种共享特性:CANopen和POWERLINK OSI模型。
【EtherNet/IP 通信】
2000年初始发布,EtherNet / IP是一个开放的工业标准,它由艾伦-布拉德(罗克韦尔自动化)和ODVA的开发(开放DeviceNet供应商协会)。“工业以太网协议“本质上是一个CIP(通用工业协议)-已被使用的ControlNet和DeviceNet上的以太网的数据传输协议。EtherNet/IP通常是在美国市场上得到非常好的应用,主要是使用罗克韦尔控制系统。它如何工作?EtherNet/IP在标准以太网硬件上运行,并同时使用TCP/IP和UDP/IP进行数据传输。由于CIP协议支持生产者/消费者模式,EtherNet/IP采用不同的通信机制来处理,例如周期性轮询,时间或事件触发,多波或简单的点对点连接,CIP应用协议分为“隐性的”I/O信息和“显性的”用于配置和数据采集的请求/应答报文。当显性信息嵌入到TCP帧,实时应用数据通过UDP发送,因为后者格式更紧凑且开销小。形成一个中心星型网络拓扑结构,交换机通过点对点挂钩连接方式防止数据碰撞。EtherNet/IP网络通常实现10mS左右的软实时性能,而CIP Sync和CIP Motion及精确的节点同步则通过在IEEE1588标准定义的分布式时钟方法可以达到极低的循环周期和抖动,使得它能够用于伺服电机的控制与驱动。
【EtherCAT 通信】
EtherCAT(以太网控制自动化技术)Beckhoff自动化。这项技术的所有用户自动成为EtherCAT技术协会(ETG)的成员。它是如何工作?EtherCAT是基于集束帧方法:EtherCAT主站发送包含网络所有从站数据的数据包,这个帧按照顺序通过网络上的所有节点,当它到达最后一个帧,帧将被再次返回。当它在一个方向上通过时节点处理帧中的数据。每个节点读出数据并将响应数据插入到帧中。为了支持100 Mbit/s的波特率,必须使用专用的ASIC或基于FPGA的硬件来高速处理数据。因此,EtherCAT网络拓扑总是构成一个逻辑环。一个EtherCAT帧结构所有给每个节点的指令都被包含在一个EtherCAT数据报文的有效载荷区。每个EtherCAT帧由一个头和几个EtherCAT的命令构成。每个命令包括它自己的头,给节点的指令数据,及一个工作计数器。高达64 KB的可配置地址空间来配置从站。寻址处理通过自动递增方式,即每个从站可以处理16位地址域,从站也可以在网络初始阶段以指派方式来实现分布式的站点寻址。EtherCAT过程同步:每个从站连接由主站提供的一个类似于IEEE1588的实时时钟技术进行同步。从站设备可以是实时也可以是非实时机制,这更多取决于硬件。基于实时时,控制信号可以高精度同步。在物理层,EtherCAT协议不仅在以太网上运行,也可以采用LVDS(低压差分信号传输)。这个标准被Beckhoff使用在其端子技术上,典型的是采用带有标准以太网接口的PC作为一个EtherCAT主站。相较于POWERLINK或PROFINET等协议,EtherCAT仅贯穿OSI 7层模型中的1-3层,因此,为了实现与其它系统相同的应用功能,必须加载额外的协议层(CoE,EoE)。
【SERCOSIII 通信】
这是一个免费提供的面向数字驱动接口的实时通信标准,SERCOSIII不仅有特定的物理层连接的硬件架构,同时SERCOS接口的协议结构和应用规范的定义也是特定的。SERCOSIII是SERCOS的第三代,SERCOS于1985年被推向市场,是一个标准的遵循IEEE802.3的数据传输协议,这个通信系统最初使用在基于运动控制的自动化系统,一个已注册的协会:SERCOS国际协会,支持这项技术的发展并保持标准的一致性。它如何工作?SERCOSIII在主站和从站均采用特定硬件,这些SERCOSIII硬件减轻了主CPU的通信任务,并确保了快速的实时数据处理和基于硬件的同步,从站需要特殊的硬件,而主站可以基于软件方案,SERCOS用户组织提供SERCOSIII的IP Core给基于FPGA的SERCOSIII硬件开发者。SERCOSIII采用集束帧方式来传输,网络节点必须采用菊花链或封闭的环形拓扑,由于以太网具有全双工能力,菊花链实际上已经构成一个独立的环。因此对于一个环形拓扑实际上相当于提供一个双环,使得它允许冗余数据传输。直接交叉通信能力是由每个节点上的两个端口来实现,在菊花链和环形网络,实时报文在他们向前和向后时经过每个节点,因此,节点具有在每个通信周期中相互通信两次而无需通过主站的能力,无需经过主站对数据进行路由。除了实时通道,它也使用时间槽方式进行无碰撞的数据传输,SERCOSIII也提供可选的非实时通道来传递异步数据。节点通过硬件层进行同步,在通信循环的第一个报文初期,主站同步报文MST被嵌入到第一个报文来达到这个目的,确保在100nS以下的高精度时钟同步偏移,基于硬件的过程补偿了运行延迟和以太网硬件所造成的偏差,不同的网段使用不同的循环时钟仍然可实现所有的同步运行。
【用户组织】
用户独立是总体评价一个系统的另一个关键因素,任何与品牌权益或专利相关的悬而未决的问题都可能会限制用户自己的开发,这是决定是否使用系统的一个关键考量因素。今后会引发的法律问题应予以预先规避:这需要深入了解始创者与用户组织的不同解决方案。PROFINET用户组织PNO,拼写为PROFIBUS Nutzerorganisatione. V.运行一个机构来管理合作项目并向成员传递信息及其它感兴趣的内容。PROFIBUS和PROFINET产品认证中心隶属于该机构,并于1996年4月24日通过章程-定义其权利和义务,且开放给所有成员公司、协会和机构、那些对于PNO感兴趣的设备供应商、用户、系统解决方案供应商或PROFIBUS及PROFINET网络运营商。POWERLINK - EPSG:Ethernet POWERLINK标准化组(EPSG)成立于2003年。作为一个独立的组织,是由在驱动器和自动化领域的各个厂商共同发起建立的。该组织的目标是将由B&R在2001年推出的这项技术进行标准化和持续的开发。EPSG也与标准化组织如CiA及IEC等合作。EPSG是一个按照瑞士民法注册的协会组织。EtherNet / IP网络 - ODVA:ODVA是所有DeviceNet和EtherNet/IP的用户联盟。该组织参与这一总线的持续发展和进一步的推广。主要在美国和亚洲,也包括欧洲。该组织活动的主旨是开发和推广CIP及其它基于此的协议。每个用户不仅可以应用这项技术,也可受邀加入对其持续发展作出贡献的特别兴趣小组(SIG)。 ODVA还积极参加其他标准化机构和行业协会。该组织的章程相对复杂。EtherCAT技术 - ETG:EtherCAT技术协会是由用户、OEM厂商以及其它自动化组件供应商共同建立的一个论坛。该组织的目的是提供支持和将EtherCAT作为一个开放技术对其收益进行宣传。所有的合作协议必须与Beckhoff自动化直接签署。EtherCAT技术协会位于德国纽伦堡,是一个“非注册协会”,它是一个没有按照德国民法法典注册的机构。SERCOS III – sercos International e.V.:是一个在德国美因河畔法兰克福联邦注册的协会,这个协会的成员是由制造商和控制、驱动系统的用户,以及其它自动化组件厂商、研究机构和其它协会共同成立的。在北美及亚洲有分支机构,总部设在斯图加特大学并且有一个认证实验室。
【状态、权利和授权】
不同的用户组织哪个是合法的?谁拥有这项技术?何种法律关系取决于绑定开发者使用该项技术的授权机制,以下提供了一个就此问题的概览:1、实际性能较量:实际上,比较系统性能是件困难的事情,因为不同系统的特定性能存在差异,Ethernet/IP和PROFINET RT从开始就被排除在外,因为,这些系统仅仅适用于软实时需求而设计,PROFINET IRT由于采用了不同的交换机,这导致了应用架构的复杂性,直接的比较与测量显然不适合,下面的值是建立在公开的计算机制上的:测试场景如下:1、小型机器:一个主站和33个I/O模块(64模拟量和136数字量通道)2、I/O系统,一个主站,12个Ethernet从站带有33个模块(2000个数字量和500个模拟量通道)3、运动控制系统,带有24个伺服轴和1个I/O站,110数字量和30个模拟量。实际上,POWERLINK在大部分应用是较之EtherCAT更快的,EtherCAT仅仅是为低网络负载而优化的,对于重负载系统而言,EtherCAT环境下有着极不相称的循环周期提升,如果用于实现一个分布式架构(例如分布式运动控制),Ether-CAT由于缺乏直接交叉通信而导致巨大的性能降低。一个直接的EtherCAT I/O集成将导致非常低的采样率(I/O系统),由于时间信号必须经过每个I/O从而直接的影响了整个循环周期。Prytz(2008)发布的方法可用于计算EtherCAT的参考,信号通过EtherCAT ASIC的信号延迟也被再次验证。对于POWERLINK,其实际应用产品设置并进行实际测试-这使得它引用的测试数据毋庸置疑。没有测试数据用于SERCOSIII,然而,SERCOSIII可以预期与POWERLINK提供相同等级的实时性,事实上,在很多领域SERCOSIII同样较之EtherCAT更快的系统速度。
【实现】
实现成本包括开发费用、License费用和硬件费用,代码可用性(程序或在硬件实现中的VHDL代码)必须在这种情况中予以考虑。主站实现,从站实现:对于EtherCAT,SERCOSIII和PROFINET IRT,实现从站的总线协议需要使用硬件方案ASIC,对于POWERLINK,Ethernet/IP和PROFINET RT基于微处理的软件方案可以使用,对于软件方案而言,协议栈的License费用需要考虑,可能其它额外的费用例如使用更为强大的控制器,对于硬件方案,用户可以使用FPGA或基于ASIC的通信接口,理论上,FPGA也可以被用于软件方案。FPGA是一种集成电路,它允许开发者自主配置他们的硬件。它有逻辑器件构成,即所谓的逻辑单元,一个层级可以用于重新配置电路。所有ASIC可以实现的功能FPGA均可实现。而且,它可以在调试前定制。相较于ASIC,FPGA的一次性开发成本较低,FPGA对于工业以太网方案是一个极具吸引力的技术-因为它成本更低,性能高并具有多种协议支持能力,并且它允许在组件内实现预安装组件功能来集成二级功能(Hub,交换机),当然,用户需要清楚协议的代码容量需求量及相应地逻辑单元的数量,L2功能也对数量有较大的影响。交换机比HUB需要更多的块,而复杂的管理交换则需要更多数量的逻辑单元。POWERLINK是一个较为简单的实时以太网方案,由于POWERLINK网络里仅需要Hub,因此,这个协议仅需要非常小的逻辑块,较小的FPGA,相反,EtherCAT和SERCOSIII,则需要更多的逻辑单元不同实时以太网环境的节点间互联成本对于每个节点间的互联而言,其成本参照硬件的费用,而协议授权的成本尚未计算在内。EtherCAT:这个计算是基于最便宜的EtherCAT ASIC方案,带有2个以太网口(ET1100),EtherCAT基于FPGA的方案成本更高,这个不同很大程度在于同步方案带有实时时钟。SERCOSIII:SERCOSIII的数字是基于典型的FPGA方案来实现的。
【运行成本】
运行成本在很大程度上由维护和网络管理成本的费用构成。一些技术例如IP Sync和PROFINET IRT非常复杂并且需要非常大的网络管理成本,并且,使用交换机即需要网络经验,在很多情况下,需要一个本地的网络工程师来调试和维护系统。同步技术的应用在实时通信方案中扮演着关键角色,POWERLINK和SERCOSIII确保了通过主站管理机制下的高同步性及精确性,且极少因干扰而出错。PROFINET IRT & Ethernet/IP CIP Sync依赖于IEEE1588兼容同步机制,这导致了非常复杂的网络管理,尤其是设备必须隔离,因为硬件或软件问题将触发同步错误。
【安全功能】
集成安全技术的全球标准,通过高效率的通信,显着地降低了布线成本,缩短了调试时间,实现卓越机器性能。凭借经过认证的安全技术,最大限度地提高生产力,并确保与客户工业以太网解决方案相兼容 。
(责任编辑:admin) |
织梦二维码生成器
------分隔线----------------------------