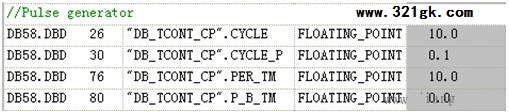
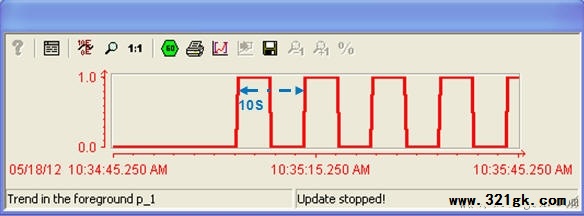
FB 58 “TCONT_CP”用于使用连续或脉冲控制信号来控制温度过程。脉冲控制功能使用脉宽调制,将模拟量可调节变量值 LMN 转换成一系列周期为PER_TM 的脉冲信号。通过设置PULSE_ON=TRUE 激活PULSEGEN,并在CYCLE_P 周期中对其进行处理。 哪些参数决定脉冲输出的周期?首先,需要熟悉几个FB 58 “TCONT_CP” 脉冲输出的重要参数:
经验关系时间法则如 下:
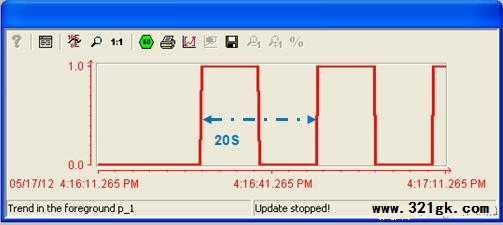
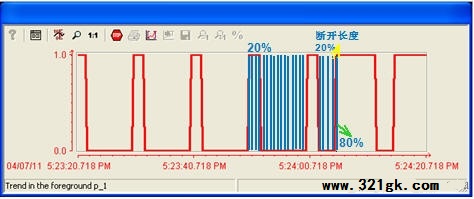
如果PID CYCLY和周期PER_TM不同会怎么样?可以为CYCLE 选择一个小于脉冲重复周期PER_TM 的数值。此设置适用于需要尽可能高的脉冲重复周期以减小执行器上的磨损,但快速过程需要的采样时间却又比较短。如果CYCLE< PER_TM,意味 着一个完整周期还没有结束,新的 PID 结果将会产生,脉冲的输出状况将会改变。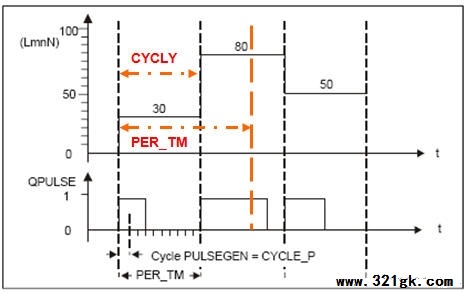 图06 如 图7,CYCLE<PER_TM,当前输出LMN=50.0,周期20S。一旦 PID 的结果发生更改,如图8,当脉冲高电平输出到20%时,新的 PID 结果LMN=80.0 到来,则脉冲会在之前的基础上继续输出余下的60%的高电平后再变为低电平,整个周期仍然保持20S。 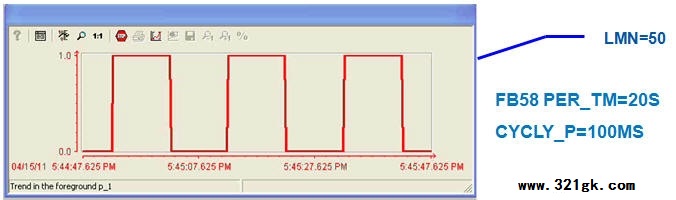 图07 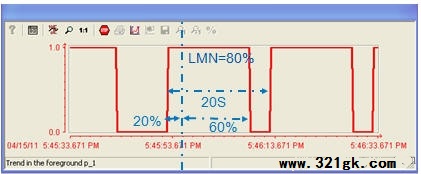 图08 如果新的PID 的结果发生在脉冲的高电平,则会有以下两种情况(黄色箭头:已经输出的高电平脉冲;绿色箭头:新的 PID 结果):
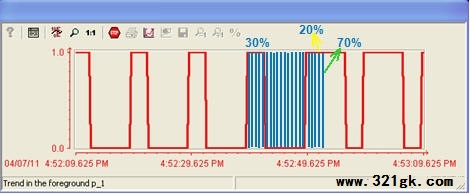 图09
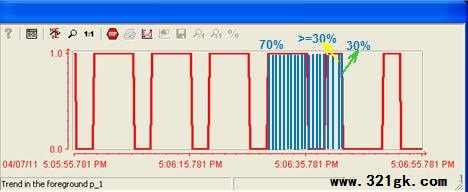 图10 如果新的PID 的结果发生在脉冲的低电平,则会有以下两种情况(黄色箭头:已经输出的低电平脉冲;绿色箭头:新的 PID 结果)::
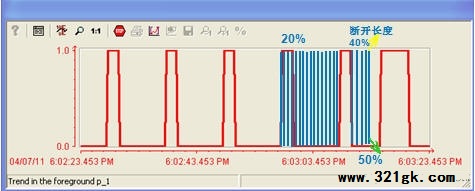 图12
(责任编辑:admin) 图12
(责任编辑:admin) |
使用PID程序块FB58模块TCONT_CP脉冲输出时需要注意什么?
时间:2016-01-06 18:09来源:未知 作者:admin 点击:
次
使用PID程序块 FB58 “TCONT_CP” 脉冲输出时需要注意什么?


顶一下
(0)
0%
踩一下
(0)
0%
------分隔线----------------------------
- 发表评论
-
- 最新评论 进入详细评论页>>
- 推荐内容
-
- PLC顺序功能图中的一个顺控器的转
怎么从PLC顺序功能图中的一个顺控器的转换到另一个顺控器?...
- 怎样在虚拟机中安装西门子WINCC软件
如何在虚拟机中安装WINCC软件...
- 西门子WINCC7.0与S7-200通过OPC通讯(
西门子WINCC7.0与S7-200系列PLC通过OPC通讯(PPI)...
- WinCC Flexible创建的项目怎样移植到博
西门子WinCC Flexible 2008 SP4创建的项目如何移植到博途软件中...
- 西门子plc S7-200系列和组态软件的通
西门子plc和组态软件的通讯...
- 西门子已存储程序的MMC卡报故障的
已存储程序的MMC卡报故障的原因及解决办法...
- PLC顺序功能图中的一个顺控器的转