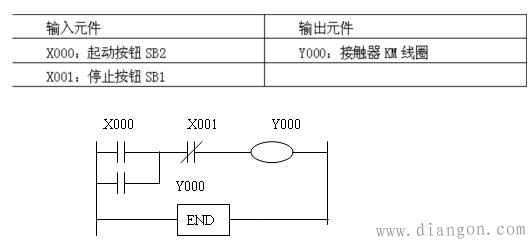
提前声明;这些物理意义的分析,非常简单,非常容易掌握,但是你必须要把下面一些推导结论的描述弄熟弄透,然后才能够进行参数整定。 在介绍PID参数整定之前,先介绍一下自动调节系统的构成。 1、被调对象 也叫被调量,包括压力、温度、水位、流量、浓度、功率、转速、电压、电流、含量、位移、方向、比例等。电厂常用的是压力、温度、水位、转速、功率。 2、调节器 最初是单回路调节器,后来发展到串级调节系统。现在一般书上把串级调节系统也叫做双回路。副调(外给定PID调节器)叫做内回路,主调(单回路调节器)叫做外回路,合称双回路。 这种叫法不大合适。为什么呢?因为当时只考虑到了两个PID串在一起组成一个调节系统,却没有考虑到两个PID不串在一起,却仍旧是一个调节系统的情况。所以给现在的表述造成困难。当时的标准:两个PID不串在一起,就是两个调节系统。不一定的。比如两个互为备用的系统,控制的是一个被调量。有人说是两套系统,不妥。也有两个串级之间相互切换的,比如两个给水泵互为备用,调节汽包水位。它们都是控制一个被调量,应该算做一个调节系统。 更为复杂的,电厂的自控人员都知道协调系统。严格来说,协调包括了两套调节系统:功率回路和汽压回路。可是一般都说协调,基本上都说在一起了。当然,协调系统说成两个系统也未尝不可,毕竟它们各有各的被调量。 3、执行机构 执行机构应该包括执行器和阀门两大部分,分类很多。 观察曲线是发现问题的最方便的办法。 现在dcs系统或无纸记录仪功能很强大,想收集什么曲线就收集什么曲线,只要这个测点被引入DCS。最初可不是这样的。20世纪90年代初笔者用的是DDZ-Ⅱ型调节器,后来是MZ-Ⅲ组件型调节系统,再后来是KMM调节器,后来才有了集中控制系统,再后来有了DCS。前三种都不能显示曲线的。只能靠两只眼睛盯着指针或者数字,根据记忆去判断调节曲线,那个费劲啊! 趋势读定法整定PID参数到底要观察哪些曲线呢?对于单回路控制系统我们要收集的曲线有:①设定值(作为比较判断依据);②被调量波动曲线;③ PID输出。 就这么简单。如果是串级调节系统,我们要收集:①设定值(作为比较判断依据);②被调量波动曲线;③ 主调PID输出;④副调的被调量曲线;⑤ PID输出曲线。 为什么不收集副调的设定值了?因为主调的输出就是副调的设定啊。 在一个比较复杂的调节系统中,副调的被调量往往不只一个,就有几个收集几个。只有收集到了这些曲线后,你才能根据曲线的波动状况进行分析。 还有的调节系统更加复杂。投不好自动,总要去分析其原因,看看有什么干扰因素存在其中,你怀疑哪个因素干扰就把哪个曲线放进来。一般的DCS都支持8组曲线在一个屏幕中,如果放不下,你就考虑怎么精简吧。 不过现在咱们还没有到个地步,复杂调节系统在后面介绍。自动调节系统,最见功夫的,最考验能力的也就是PID参数整定了。照着下面的要求去做,一步步训练下去,保证你也成为整定PID的行家里手。 plc电动机启动停止控制编程实例 传统的继电器—接触器控制的电动机的起动、自保持及停止电路,按下起动按钮SB2,接触器KM线圈得电并自锁,电动机起动运行,按下停止按钮SB1,接触器KM线圈失电,电动机停止运行。 和继电器控制系统类似,plc也是由输入部分,逻辑部分和输出部分组成。其相对应的元件安排如下
程序清单: LD X000 OR Y000 ANI X001 OUT Y000 END 电动机起动、自保持及停止控制电路是梯形图中最典型的单元,它包含了梯形图程序的全部要素,具体体现如下几点: 1.事件:每一个梯形图支路都针对一个事件。事件用输出线圈表示,本例中为Y000。 2.事件发生的条件:梯形图支路中除了线圈外还有触点的组合,使线圈置“1”的条件即是事件发生的条件,本例中为起动按钮SB2使X000“1”。 3.事件得以延续得条件:触点组合中使线圈置“1”得以保持得条件是与X000并联得Y000自锁触点闭合。 4.使事件终止的条件:触点组合中使线圈置“1”中断的条件。本例中为停止按钮SB1使X001常闭触点断开。 (责任编辑:admin) |
PID参数整定方法-plc电动机启动停止控制编程实例
时间:2017-02-16 11:40来源:未知 作者:admin 点击:
次
PID参数整定方法-plc电动机启动停止控制编程实例
顶一下
(0)
0%
踩一下
(0)
0%
------分隔线----------------------------
- 发表评论
-
- 最新评论 进入详细评论页>>