使用 PID 指令向导编程时,指令向导会自动调用 PID 指令,并且编写外围的控制变量标准化换算、定时采样等功能。用户在使用 PID 指令向导时,需要在用户程序中用 SM0.0 调用指令向导生成的子程序(如 PIDx_INIT 子程序)。PID 向导可以生成带自动/手动切换功能的子程序,这个子程序使用一个数字量点为“1”、“0”的状态来控制是否投入 PID 自动控制。
到目前为止(STEP 7-Micro/WIN V4.0 SP5),使用 PID 向导生成的子程序时,由于用户程序不能直接使用 PID 指令,它的无扰切换能力因为隔了外壳子程序,所以受到了局限。如果对无扰切换要求比较严格,需要另外编一些程序加以处理。
考察如下 PID 控制子程序。
 图 1. PID 向导生成的指令
图中:
a.过程反馈量
b.设定值,实数
c.自动/手动控制,“1”=自动,“0”=手动
d.手动控制输出值,0.0 - 1.0 之间的一个实数
e.PID 控制输出值
要实现无扰动切换,必须:
.在从自动向手动切换时,使手动输出值(VD2004)等于当前的实际控制输出值;
.在从手动向自动切换使,使设定值相当于当前的过程反馈值。
为此,可编写类似下图所示的程序,放在 PID 控制子程序之前: 无扰切换处理程序
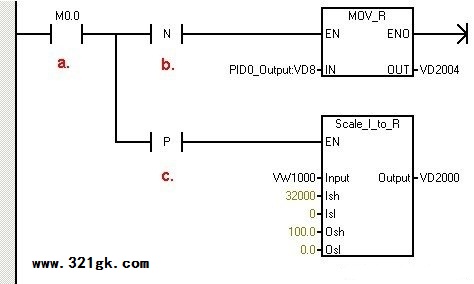 图 2. 无扰切换处理程序 图中:
a.自动/手动切换控制点
b.从自动向手动切换时,使手动输出值等于实际当前值
c.从手动向自动切换时,把当前反馈量换算为相应的给定值
上述程序中的 Scale_I_to_R 就是量程变换指令库中的子程序。这是为了解决过程反馈与设定值之间的换算问题。用户也可以自己编程换算,或者根据反馈与给定的取值范围决定是否需要换算。
此段程序适用于 STEP 7-Micro/WIN V4.0 SP5 及以前版本,仅供参考,如果在实际项目中使用,上述程序未必一定适用。用户需要根据实际工艺决定自己的编程思路。
(责任编辑:admin) |
s7-200系列PLC使用PID向导编程时PID自动/手动无扰切换
时间:2016-01-03 11:43来源:未知 作者:admin 点击:
次
使用 PID 指令向导编程时,指令向导会自动调用 PID 指令,并且编写外围的控制变量标准化换算、定时采样等功能。用户在使用 PID 指令向导时,需要在用户程序中用 SM0.0 调用指令向导生
顶一下
(0)
0%
踩一下
(0)
0%
------分隔线----------------------------
- 发表评论
-
- 最新评论 进入详细评论页>>
- 推荐内容
-
- PLC顺序功能图中的一个顺控器的转
怎么从PLC顺序功能图中的一个顺控器的转换到另一个顺控器?...
- 怎样在虚拟机中安装西门子WINCC软件
如何在虚拟机中安装WINCC软件...
- 西门子WINCC7.0与S7-200通过OPC通讯(
西门子WINCC7.0与S7-200系列PLC通过OPC通讯(PPI)...
- WinCC Flexible创建的项目怎样移植到博
西门子WinCC Flexible 2008 SP4创建的项目如何移植到博途软件中...
- 西门子plc S7-200系列和组态软件的通
西门子plc和组态软件的通讯...
- 西门子已存储程序的MMC卡报故障的
已存储程序的MMC卡报故障的原因及解决办法...
- PLC顺序功能图中的一个顺控器的转