 式中误差信号e(t) = SP(t) – PV(t),M(t)是PID控制器的输出值,Kc是控制器的增益(比例系数),Ti和Td分别是积分时间和微分时间,Minitial是M(t)的初始值,实际上是积分的初始值。 PID公式的前3项分别与误差、误差的积分和误差的导数成正比。 微分、积分是高等数学的概念,建议没有学过高等数学的网友至少要搞清楚微分和积分的几何意义,这对深入理解PID参数的意义有很大的帮助。 积分对应于下图中误差曲线e(t) 与坐标轴包围的面积(图中的灰色部分)。PID程序是周期性执行的,执行PID程序的时间间隔为Ts(即PID控制的采样周期)。我们只能使用连续的误差曲线上间隔时间为Ts的一些离散的点的值来计算积分,因此不可能计算出准确的积分值,只能对积分作近似计算。 一般用下图中的矩形面积之和来近似精确积分。当Ts较小时,积分的误差不大。 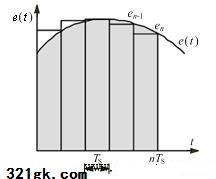 在误差曲线e(t)上作一条切线(见下图),该切线与x轴正方向的夹角α的正切值tgα即为该点处误差的一阶导数de(t)/dt。PID控制器输出表达式中的导数用下式来近似: de(t)/ dt ≈ Δe(t)/Δt = [e(n) - e(n-1)]/Ts,式中e(n)是第n次采样时的误差值,e(n-1)是第n-1次采样时的误差值。 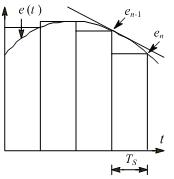 PID调节是目前应用最广泛调节控制规律,P比例、I积分、D微分控制,简称PID控制。 比例控制是一种最简单的控制方式。比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。 积分调节可以使系统消除稳态误差。系统如果在进入稳态后存在稳态误差,就必须引入“积分项”。比例+积分(PI)控制可以使系统在进入稳态后无稳态误差。 微分作用能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。因此,可以改善系统的动态性能。。对有较大惯性或滞后的被控对象,比例+微分(PD)控制能改善系统在调节过程中的动态特性。 这是摘录的一个PID参数调整的口诀,以供大家学习参考: 参数整定找最佳,从小到大顺序查 先是比例后积分,最后再把微分加 曲线振荡很频繁,比例度盘要放大 曲线漂浮绕大湾,比例度盘往小扳 曲线偏离回复慢,积分时间往下降 曲线波动周期长,积分时间再加长 曲线振荡频率快,先把微分降下来 动差大来波动慢。微分时间应加长 理想曲线两个波,前高后低4比1 一看二调多分析,调节质量不会低。 这个顺口溜流传甚广,我觉得可操作性很低(也可能是我的悟性不够),我有很多疑问: “从小到大顺序查“,查什么? 一定要”先是比例后积分“吗?直接用PI不好吗? “曲线振荡很频繁”,是指振荡频率高还是振荡次数多? 什么是”比例度盘“? ”曲线漂浮绕大湾“什么意思?是指超调量大吗?还是上升缓慢? ”曲线波动周期长“的周期是震荡周期吗?还是过度过程时间长? 振荡频率和微分关系大吗?微分的主要作用是什么? “理想曲线两个波”,一个波是180度还是360度?两个波是理想曲线,下图的PV曲线理不理想? 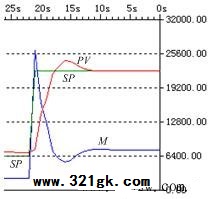 我用过S7-200和S7-200 SMART的PID调节控制面板和PID参数自整定功能,被控制对象采用我编写的子程序来模拟。被控对象的参数如下:增益为3.0,两个惯性环节的时间常数为5s和2s。 下面是自整定之前的曲线,超调量太大: 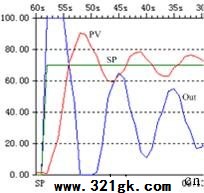 下面是整定过程的曲线: 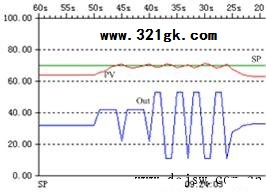 下面是整定得到的参数的曲线: 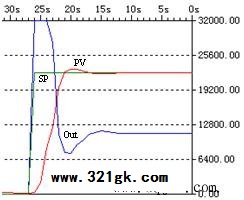 下面是另一组整定前的参数的曲线,过程变量PV曲线上升太慢: 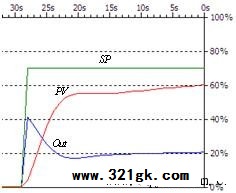 虽然整定前两组PID参数相差很远,两次整定后得到PID参数差不多,使用整定得到的PID参数的曲线形状也差不多。 我觉得西门子的PID参数自整定是很好用的。 要用好PID调节,搞清楚PID的计算公式和PID参数的意义是很有必要的。下面是PID的公式: 式中误差信号e(t) = SP(t) – PV(t),M(t)是PID控制器的输出值,Kc是控制器的增益(比例系数),Ti和Td分别是积分时间和微分时间,Minitial是M(t)的初始值,实际上是积分的初始值。 PID公式的前3项分别与误差、误差的积分和误差的导数成正比。 微分、积分是高等数学的概念,建议没有学过高等数学的网友至少要搞清楚微分和积分的几何意义,这对深入理解PID参数的意义有很大的帮助。 积分对应于下图中误差曲线e(t) 与坐标轴包围的面积(图中的灰色部分)。PID程序是周期性执行的,执行PID程序的时间间隔为Ts(即PID控制的采样周期)。我们只能使用连续的误差曲线上间隔时间为Ts的一些离散的点的值来计算积分,因此不可能计算出准确的积分值,只能对积分作近似计算。 一般用下图中的矩形面积之和来近似精确积分。当Ts较小时,积分的误差不大。 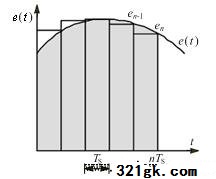 在误差曲线e(t)上作一条切线(见下图),该切线与x轴正方向的夹角α的正切值tgα即为该点处误差的一阶导数de(t)/dt。PID控制器输出表达式中的导数用下式来近似: de(t)/ dt ≈ Δe(t)/Δt = [e(n) - e(n-1)]/Ts,式中e(n)是第n次采样时的误差值,e(n-1)是第n-1次采样时的误差值。 1.模糊控制的关键点在于总结大量的实践数据,然后做成黑匣子,看似神秘,实际都是经验参数! 2.模糊控制得到的数据是基于控制设备性能不变的情况下,是较为准确的。一旦使用时间长了,性能有所下降,这些经验参数往往就会有很大的偏颇了。 3.即使是同样型号的不同设备,其所处于的工艺环境,工艺流程,工艺特性的不同,其性能也会有差别,因此不能做到模糊控制中同一数据的重复性使用。 4.模糊控制的理念是很好的,最起码是超前控制,但就目前而言,其实用性,动态性还是不如传统的PID。 5.传统PID是滞后控制,在目前的大多数工艺环境下,还是可以满足控制的需求的。 6.基于传统PID的特点,也延展了不同的控制方式,如串级调节,三冲量调节,分程调节,步进式等等。 (责任编辑:admin) |
西门子PID调节应用及技巧探讨-过程变量PV曲线
时间:2016-01-03 14:57来源:未知 作者:admin 点击:
次
要用好PID调节,搞清楚PID的计算公式和PID参数的意义是很有必要的。下面是PID的公式: 式中误差信号e(t)=SP(t)PV(t),M(t)是PID控制器的输出值,Kc是控制器的增益(比例系数),Ti和Td分别
顶一下
(0)
0%
踩一下
(0)
0%
------分隔线----------------------------
- 发表评论
-
- 最新评论 进入详细评论页>>
- 推荐内容
-
- PLC顺序功能图中的一个顺控器的转
怎么从PLC顺序功能图中的一个顺控器的转换到另一个顺控器?...
- 怎样在虚拟机中安装西门子WINCC软件
如何在虚拟机中安装WINCC软件...
- 西门子WINCC7.0与S7-200通过OPC通讯(
西门子WINCC7.0与S7-200系列PLC通过OPC通讯(PPI)...
- WinCC Flexible创建的项目怎样移植到博
西门子WinCC Flexible 2008 SP4创建的项目如何移植到博途软件中...
- 西门子plc S7-200系列和组态软件的通
西门子plc和组态软件的通讯...
- 西门子已存储程序的MMC卡报故障的
已存储程序的MMC卡报故障的原因及解决办法...
- PLC顺序功能图中的一个顺控器的转