1、首先确定步进电机拖动负载所需要的扭矩。最简单的方法是在负载轴上加一杠杆,用弹簧秤拉动杠杆,拉力乘以力臂长度既是负载力矩。或者根据负载特性从理论上计算出来。由于步进电机是控制类电机,所以目前常用步进电机的最大力矩不超过 45Nm ,力矩越大,成本越高,如果您所选择的电机力矩较大或超过此范围,可以考虑加配减速装置。 2、确定步进电机的最高运行转速。转速指标在步进电机的选取时至关重要,步进电机的特性是随着电机转速的升高,扭矩下降,其下降的快慢和很多参数有关,如 : 驱动器的驱动电压、电机的相电流、电机的相电感、电机大小等等,一般的规律是:驱动电压越高,力矩下降越慢;电机的相电流越大,力矩下降越慢。在设计方案时,应使电机的转速控制在 1500 转 / 分或 1000 转 / 分,当然这样说很不规范,可以参考〈矩 - 频特性〉。 3、根据负载最大力矩和最高转速这两个重要指标,再参考〈矩 - 频特性〉,就可以选择出适合自己的步进电机。如果您认为自己选出的电机太大,可以考虑加配减速装置,这样可以节约成本,也可以使您的设计更灵活。要选择好合适的减速比,要综合考虑力矩和速度的关系,选择出最佳方案。 4、最后还要考虑留有一定的(如百分之30 )力矩余量和转速余量。 5、尽量选择混合式步进电机,它的性能高于反映式步进电机。 6、尽量选取细分驱动器,且使驱动器工作在细分状态。 7、选取时且勿走入只看电机力矩这一个指标的误区,也就是说并非电机的扭矩越大越好,要和速度指标一起考虑。 8、在转速要求较高的情况下可以选择驱动电压高一点的驱动器。
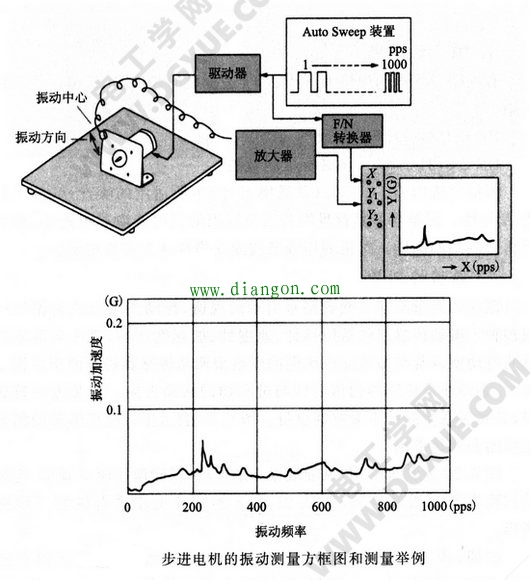
9、在选购时是采用两相的还是三相的,这并没有什么具体的要求,只要步距角能满足使用要求就行。 振动的测量不同于噪音测量所示的规格,振动测量方法及振动计有很多种。振动传感器包括位移计、速度针、加速度计等,其中与速度成比例的电动型以及与加速度成比例的压电型振动传感器较常使用。振动测量时,必须注意传感器的指向性与被测物的振动方向。安装振动传感器时,必须注意使振动不影响到自身。下图表示步进电机的振动测量功能框图和测量举例。
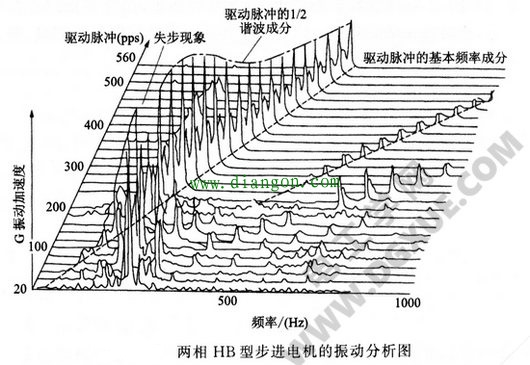
上图的测量举例,纵轴取振动加速度,横轴取作驱动频率,连续自动扫频测量。相对应的,下图为2相HB型步进电机的三维振动图形。
亦即,步进电机的驱动脉冲波连续自动扫频,每次记录频率分析的结果用三维表示。Y(倾斜)轴表示步进电机脉冲频率,X(横)轴表示振动频率,Z(纵)轴表示振动加速度。由此可以看出,何处的驱动脉冲,频率多少时,会产生的振动大小,一目了然,易于分析振动结果。 根上振动分析图,从振动大的地方看到,驱动脉冲的基波频率造成振动成分最大,且出现的振动点为其偶次谐波,180pps附近的振动为振动加速度与转子及其负载系统的自然频率的共振。 HB型步进电机转子及定子有多齿数的关系,激磁磁通含有很多的空间高次谐波,同时激磁电流也含有高次谐波,激磁磁通与电流之积所产生的电磁转矩也会包含转矩波动,引起径向振动。上振动分析图所示步进电机的振动主要是前者,而噪音或定子的径向振动的原因主要是后者。 (责任编辑:admin) |
步进电机选型原则 步进电机振动的测量方法图解
时间:2018-08-29 08:09来源:未知 作者:admin 点击:
次
步进电机选型原则-步进电机振动的测量方法图解
顶一下
(0)
0%
踩一下
(0)
0%
------分隔线----------------------------
- 发表评论
-
- 最新评论 进入详细评论页>>