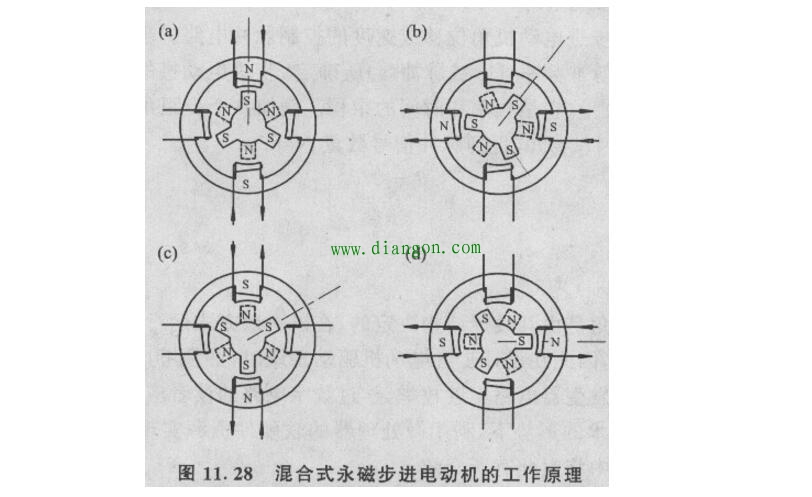
图中的电动机定子有4个沿圆周均匀分布的齿,线圈绕制在齿上且成对连接。具有不同极性的两段转子各有3个齿。图中以实线表示S段,以虚线表示N段,两段转子交错半个齿距。 当绕组中不通电流时,因为转子中的永磁体总是试图减少磁路中的磁阻,转子将趋向有限的若干位置,直至N极和S极转子上各有一齿与定子磁极对齐。对于图中的电机来说,这样的位置有12个。将转子保持在这些位置上的转矩通常不大,称之为维持转矩。
如果如图11. 28(a)那样有电流通过一相绕组,在定子上产生的N极和S极将吸引异性转子段上的齿,在这种情况下,只有和转子的齿数一样的3个稳定位置,将转子从定位位置上拉开的转矩要大得多,称为锁定转矩。 将通电方式由图(a)切换至图(b),定子磁场转过90。,并将吸引另一对齿,结果转子旋转了30。,相当于一个整步。在从图(b)到图(c)中,励磁又回到前一绕组,但是电流方向相反,可使转子再前进一整步。在图(d)中再使第二相绕组电流反向又可前进一步。这样转子就走过了一个齿距。步骤从图(d)后再回到图(a),如此反复,形成电动机的旋转运动,每转需要12步。显然,以相反的顺序激励定子绕组,电动机将反转。 通常定子的小齿以不同于转子的齿距均匀分布,在齿数较多的电动机中,定子和转子的齿距排列使得只有转子对面的两个齿与两个相距180。的定子齿完全对齐。同时,相距90。机械角处的定转子齿则完全错开。对于这样结构的混合式电动机,可用如下的公式计算其每转步数N=┃NrNs/(Ns-Nr)┃ 其中,N为每转步数;Nr和Ns分别是转子和定子的齿数。 步进电动机是为了精确位移设计的,为了达到较高精度效率必然偏低电流大,不是直流电机加电就可运行。且步进电机是靠单片子产生脉冲来控制转矩的,单片机本身驱动电流较小,驱动不了电机绕组,要用驱动电路产生较大电流,直接驱动会烧坏单片机。 (责任编辑:admin) |
混合式步进电动机的工作原理图解
时间:2018-05-17 10:46来源:未知 作者:admin 点击:
次
图中的电动机定子有4个沿圆周均匀分布的齿,线圈绕制在齿上且成对连接。具有不同极性的两段转子各有3个齿。图中以实线表示S段,以虚线表示N段,两段转子交错半个齿距。 当绕组
顶一下
(0)
0%
踩一下
(0)
0%
------分隔线----------------------------
- 上一篇:分析三相异步电动机星三角+正反转电路图原理
- 下一篇:重载电动机如何选择变频器
- 发表评论
-
- 最新评论 进入详细评论页>>