在电力拖动控制系统中,当三相交流电动机出现长期带负荷欠电压下运行、长期过载运行以及长期单相运行等不正常情况时,会导致电动机绕组严重过热乃至烧坏。为了充分发挥电动机的过载能力,保证电动机的正常启动和运转,而当电动机一旦出现长时间过载时又能自动切断电路,从而出现了能随过载程度而改变动作时间的电器,这就是热继电器。显然,热继电器在电路中是做三相交流电动机的过载保护用。但须指出的是,由于热继电器中发热元件有热惯性,在电路中不能做瞬时过载保护,更不能做短路保护。因此,它不同于过电流继电器和熔断器。
按相数来分,热继电器有单相、两相和三相式共三种类型,每种类型按发热元件的额定电流又有不同的规格和型号。三相式热继电器常用于三相交流电动机,做过载保护。
按职能来分,三相式热继电器又有不带断相保护和带断相保护两种类型。
1、热继电器的保护特性
因为热继电器的触点动作时间与被保护的电动机过载程度有关,所以在分析热继电器工作原理之前,首先要明确电动机在不超过允许温升的条件下,电动机的过载电流与电动机通电时间的关系。这种关系称为电动机的过载特性。
当电动机运行中出现过载电流时,必将引起绕组发热。根据热平衡关系,不难得出在允许温升条件下,电动机通电时间与其过载电流的平方成反比的结论;
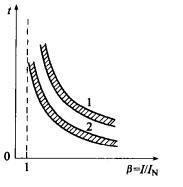
为了适应电动机的过载特性而又起到过载保护作用,要求热继电器也应具有如同电动机过载特性那样的反时限特性。为此,在热继电器中必须具有电阻发热元件,利用过载电流通过电阻发热元件产生的热效应使感测元件动作,从而带动触点动作来完成保护作用。热继电器中通过的过载电流与热继电器触点的动作时间关系,称为热继电器的保护特性,如图1中曲线2所示。考虑各种误差的影响,电动机的过载特性和继电器的保护特性都不是一条曲线,而是一条带子。显而易见,误差越大,带子越宽;误差越少,带子越窄。
由图中曲线l可知,电动机出现过载时,工作在曲线1的下方是安全的。因此,热继电器的保护特性应在电动机过载特性的邻近下方。这样,如果发生过载,热继电器就会在电动机末达到其允许过载极限之前动作,切断电动机电源,使之免遭损坏。
2、热继电器的工作原理
热继电器中产生热效应的发热元件,应串接于电动机电路中,这样,热继电器便能直接反映电动机的过载电流。热继电器的感测元件,一般采用双金属片。所谓双金属片,就是将两种线膨胀系数不同的金属片以机械辗压方式使之形成一体。膨胀系数大的称为主动层,膨胀系数小的称为被动层。双金属片受热后产生线膨胀,由于两层金属的线膨胀系数不同,且两层金属又紧密地贴合在一起,因此,使得双金属片向被动层一侧弯曲,由双金属片弯曲产生的机械力便带动触点动作。
双金属片的受热方式有4种,即直接受热式、间接受热式、复合受热式和电流互感器受热式。直接受热式是将双金属片当做发热元件,让电流直接通过它;间接受热式的发热元件由电阻丝或带制成,绕在双金属片上且与双金属片绝缘;复合受热式介于上述两种方式之间;电流互感器受热式的发热元件不直接串接于电动机电路,而是接于电流互感器的二次侧,这种方式多用于电动机电流比较大的场合,以减少通过发热元件的电流。
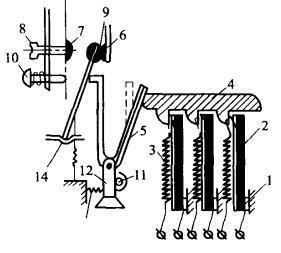
图2:热继电器的结构原理图
热元件3串接在电动机定子绕组中,电动机绕组电流即为流过热元件的电流。当电动机正常运行时,热元件产生的热量虽能使双金属片2弯曲,但还不足以使继电器动作;当电动机过载时,热元件产生的热量增大,使双金属片弯曲位移增大,经过一定时间后,双金属片弯曲到推动导板4,并通过补偿双金属片5与推杆14将触点9和6
分开,触点9和6为热继电器串于接触器线圈回路的常闭触点,断开后使接触器失电,接触器的常开触点断开电动机的电源以保护电动机。
调节旋钮11是一个偏心轮,它与支撑件12构成一个杠杆,13是一压簧,转动偏心轮,改变它的半径即可改变补偿双金属片5与导板4的接触距离,因而达到调节整定动作电流的目的。此外,靠调节复位螺钉8来改变常开触点7的位置使热继电器能工作在手动复位和自动复位两种工作状态。调试手动复位时,在故障排除后要按下按钮10才能使动触点恢复与静触点6相接触的位置。
3、带断相保护的热继电器
三相电动机的一根接线松开或一相熔丝熔断,是造成三相异步电动机烧坏的主要原因之一。如果热继电器所保护的电动机是Y接法,当线路发生一相断电时,另外两相电流便增大很多,由于线电流等于相电流,流过电动机绕组的电流和流过热继电器的电流增加比例相同,因此普通的两相或三相热继电器可以对此作出保护。如果电动机是△形接法,发生断相时,由于电动机的相电流与线电流不等,流过电动机绕组的电流和流过热继电器的电流增加比例不相同,而热元件又串联在电动机的电源进线中,按电动机的额定电流即线电流来整定,整定值较大。当故障线电流达到额定电流时,在电动机绕组内部,电流较大的那一相绕组的故障电流将超过额定相电流,便有过热烧毁的危险。所以△接法必须采用带断相保护的热继电器。
带有断相保护的热继电器是在普通热继电器的基础上增加一个差动机构,对三个电流进行比较。差动式断相保护装置结构原理如图3所示。热继电器的导板改为差动机构,由上导板1、下导板2及杠杆5组成,它们之间都用转轴连接。
图3 a为通电前机构各部件的位置。图3 b为正常通电时的位置,此时三相双金属片都受热向左弯曲,但弯曲的挠度不够,所以下导板向左移动一小段距离,继电器不动作。图3 c是三相同时过载时的情况,三相双金属片同时向左弯曲,推动下导板2向左移动,通过杠杆5使常闭触点立即引计。图3d是C相断线的情况,这时C相双金属片逐渐冷却降温,端部向右移动,推动上导板1向右移。而另外两相双金属片温度上升,端部向左弯曲,推动下导板2继续向左移动。由于上、下导板一左一右移动,产生了差动作用,通过杠杆的放大作用,使常闭触点打开。由于差动作用,使热继电器在断相故障时加速动作,保护电动机。
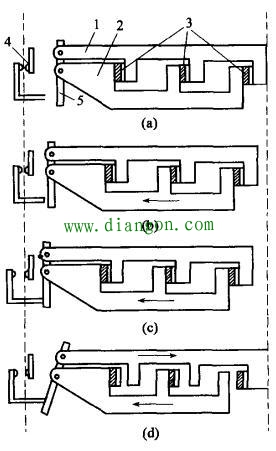
1上导板;2下导板;3双金属片;4常闭接点;5杠杆
(责任编辑:admin) |