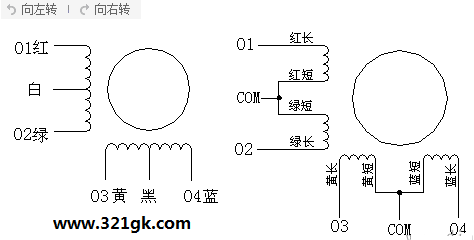
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 减速电机是由减速器(齿轮箱)+电机组成而成,电机提供的是高速转速,但力矩很小,惯性大;减速器的功能则是降低转速、提升扭矩,降低惯性,已到达理想的转速和力矩;比如常见的有电动窗帘、电动卷闸门,都采用了减速电机,转速慢、力矩大。 简单的说步进电机可以可以定长定速的控制,比如,工作台走1米,转速可以自由设定,常见的应用案例有,铣床的工作台步进电机。两者的区别是步进电机可以定速、定时(想走多长、转多快可设定);减速机的转速是由减速比来决定的,不能调节速度的快慢;但步进电机力矩小,减速电机力矩大。 步进电机,可以定长定速的控制,比如,工作台走1米,速度500R/MIN,但减速电机做不到,假如是三相异步减速电机,它通过齿轮箱来减速,但速度不好调,要通过变频器调速,而且,也做不到说我想走多少行程就多少,它要实现步进电机那功能的话(定长调速),要与变频器和编码器合用.另外减速电机力大,步进电机一般力都不怎么大,步进加减速机可以力大。 8线步进电机接线方法 在没有电机说明书时,可以用万用表确认电机8引线的极性,具体步骤如下:
两相步进电机在定子上只有两个绕组,有四根出线,整步为1.8°,半步为0.9°。在驱动器中,只要对两相绕组电流通断和电流方向进行控制就可以了。而四相步进电机在定子上有四个绕组,有八根出线,整步为0.9°,半步为0.45°,不过驱动器中需要对四个绕组进行控制,电路相对复杂了。 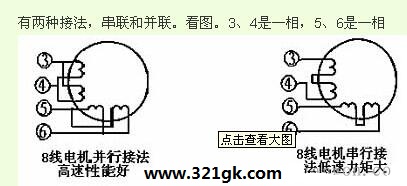 (责任编辑:admin) |
步进电机和减速电机的区别-8线步进电机接线方法
时间:2017-03-06 10:58来源:未知 作者:admin 点击:
次
步进电机和减速电机的区别-8线步进电机接线方法

顶一下
(0)
0%
踩一下
(0)
0%
------分隔线----------------------------
- 发表评论
-
- 最新评论 进入详细评论页>>